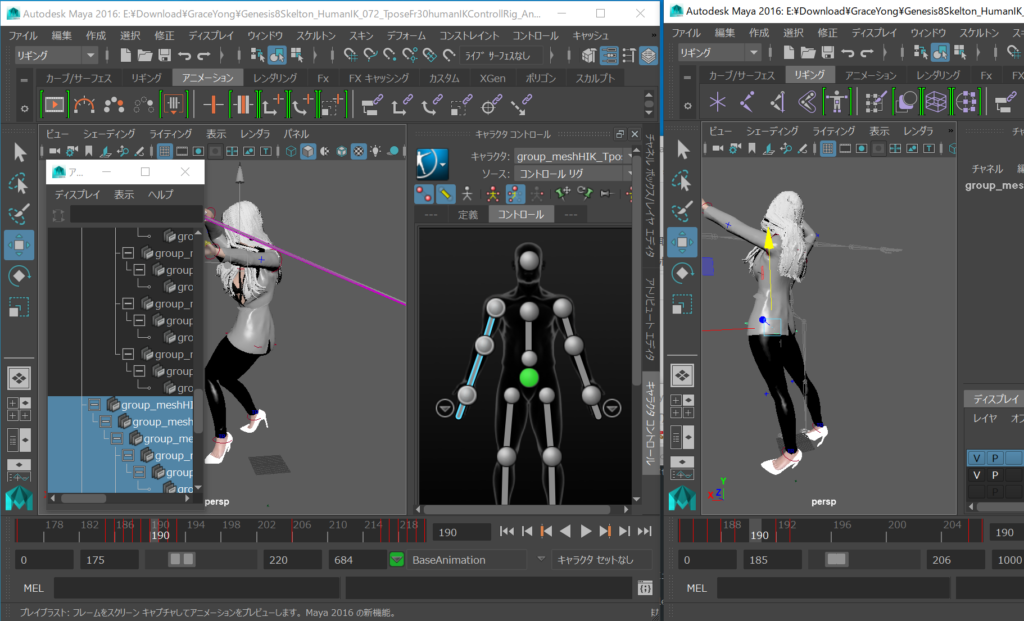
HumanIKのコントローラーのRIGアニメーション作成は楽しいので昔のKeyFrameを新しいファイルに入れたいときに使う。
どうしてもRigなので引っ張られている分ポーズがまんま持っていけるわけではないので確認と調整が必要、ポーズによってはそのまま使える
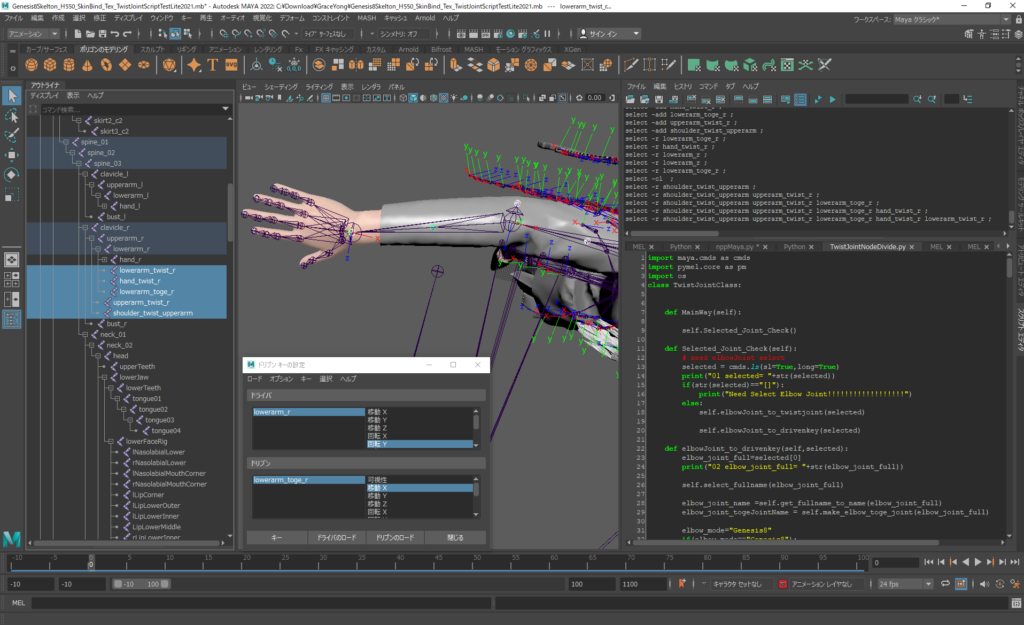
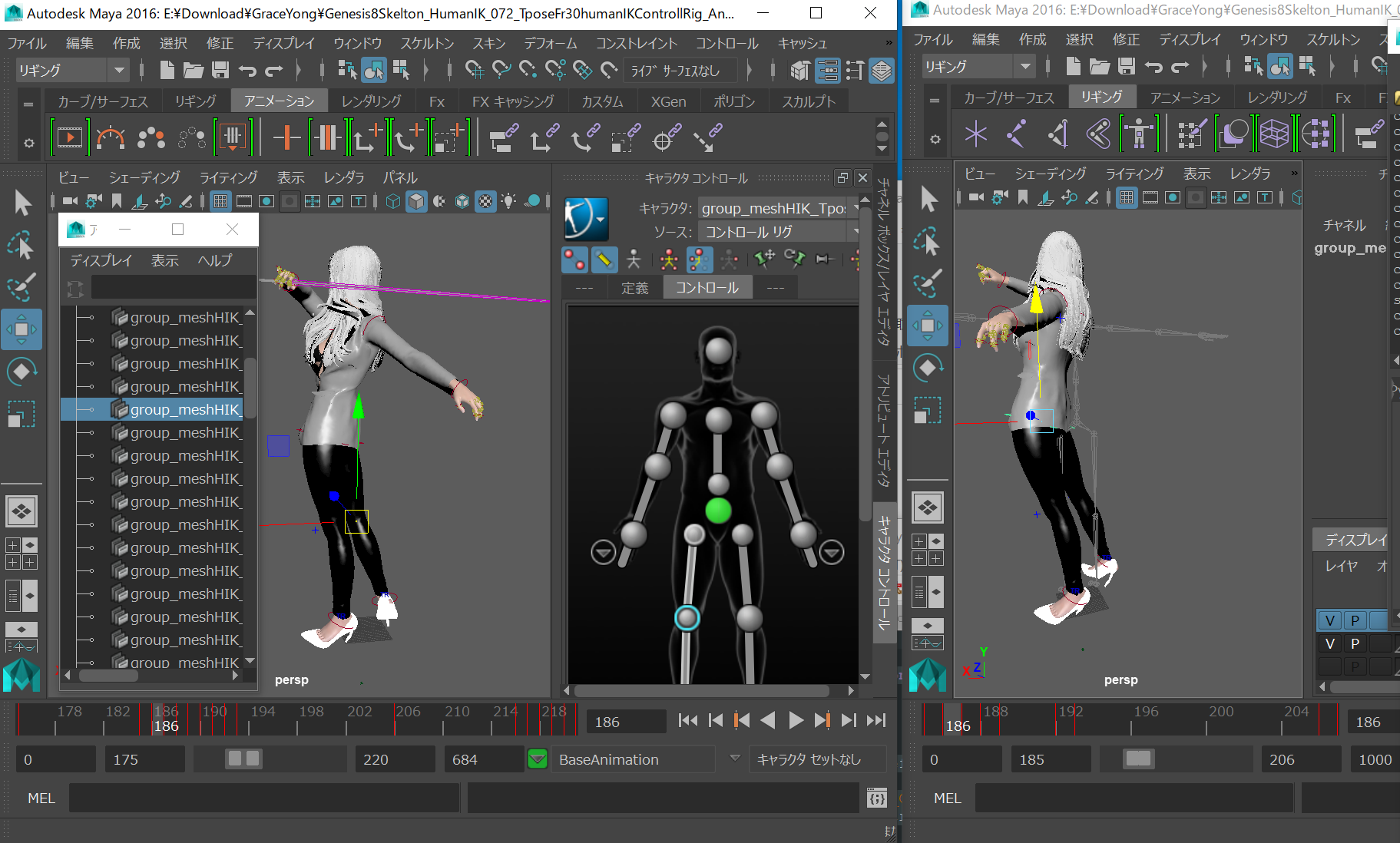
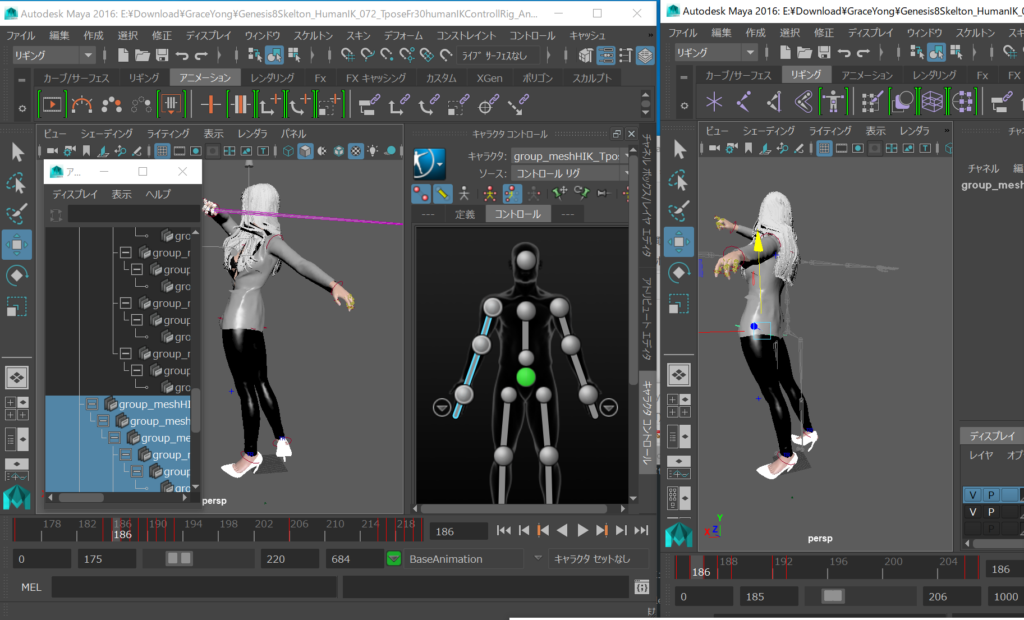
OKなポーズ
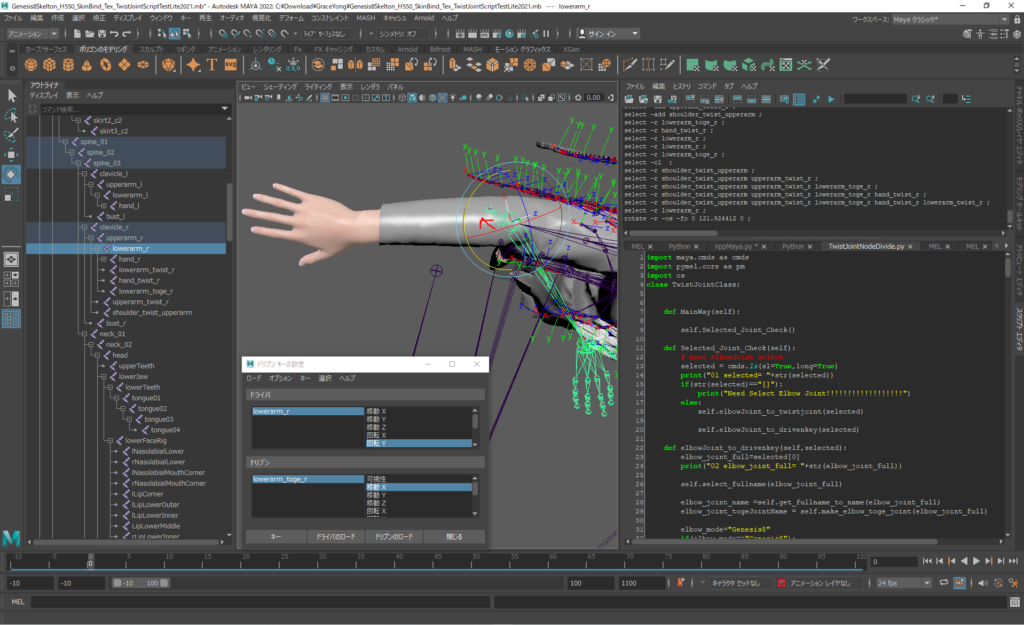
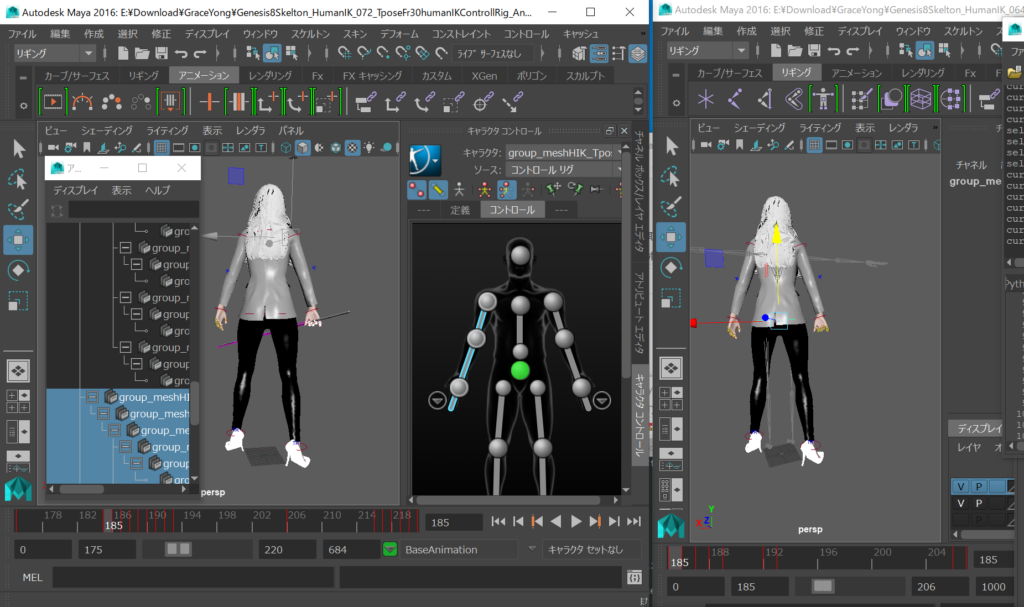
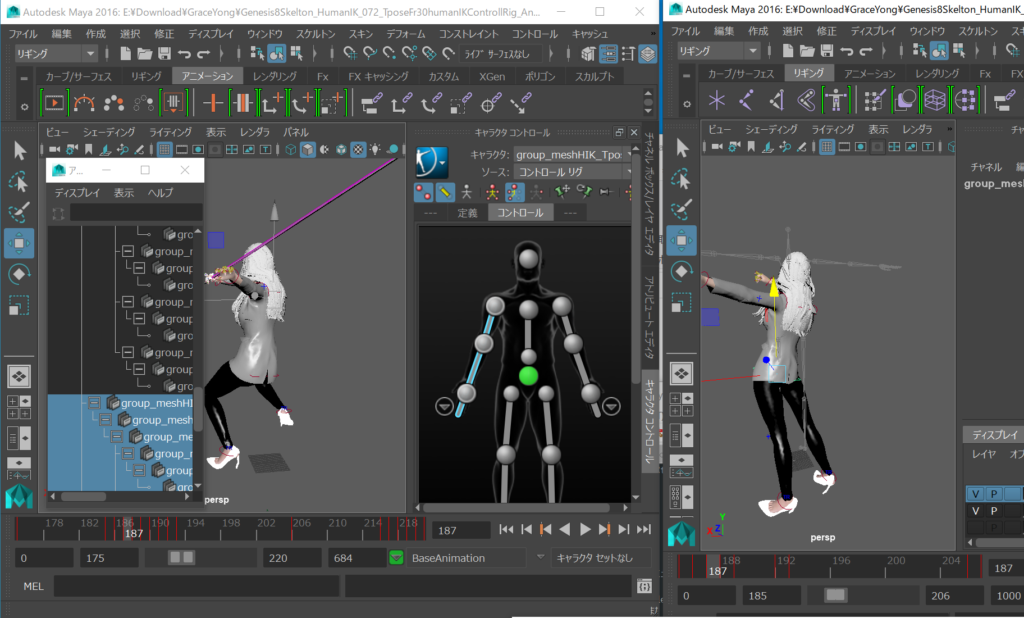
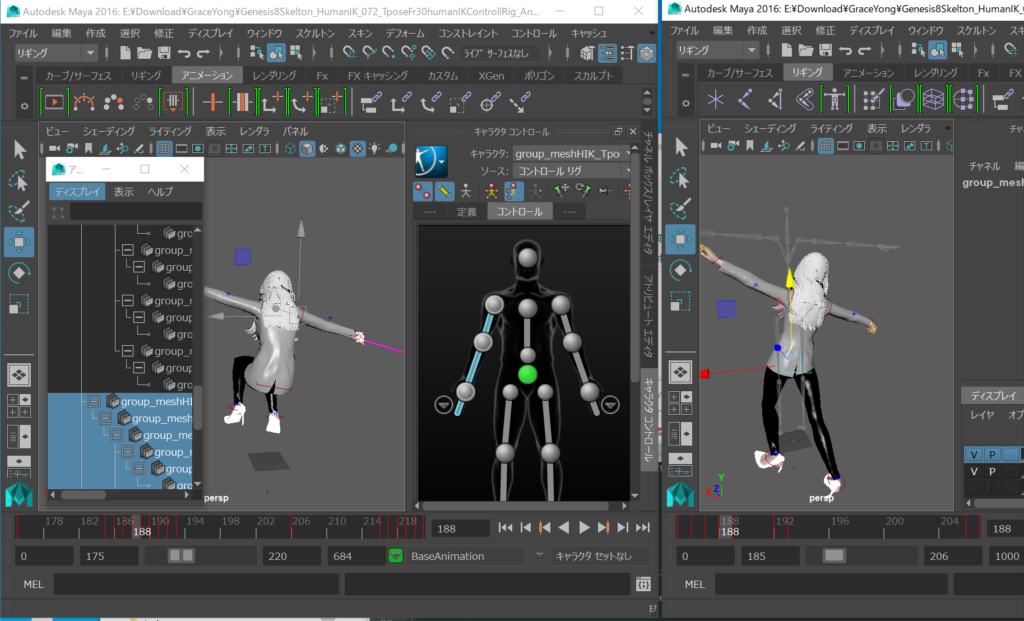
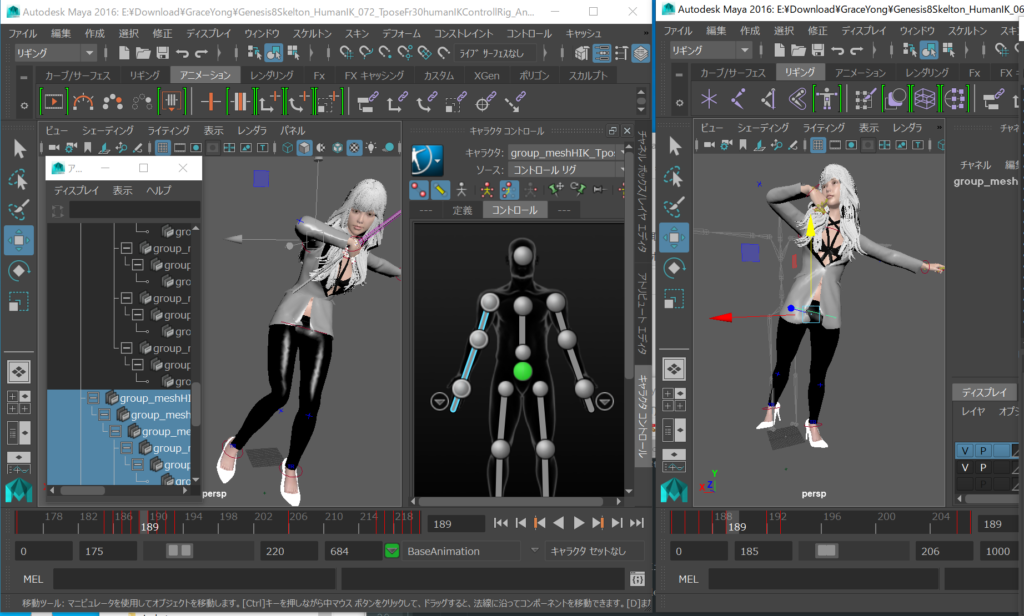
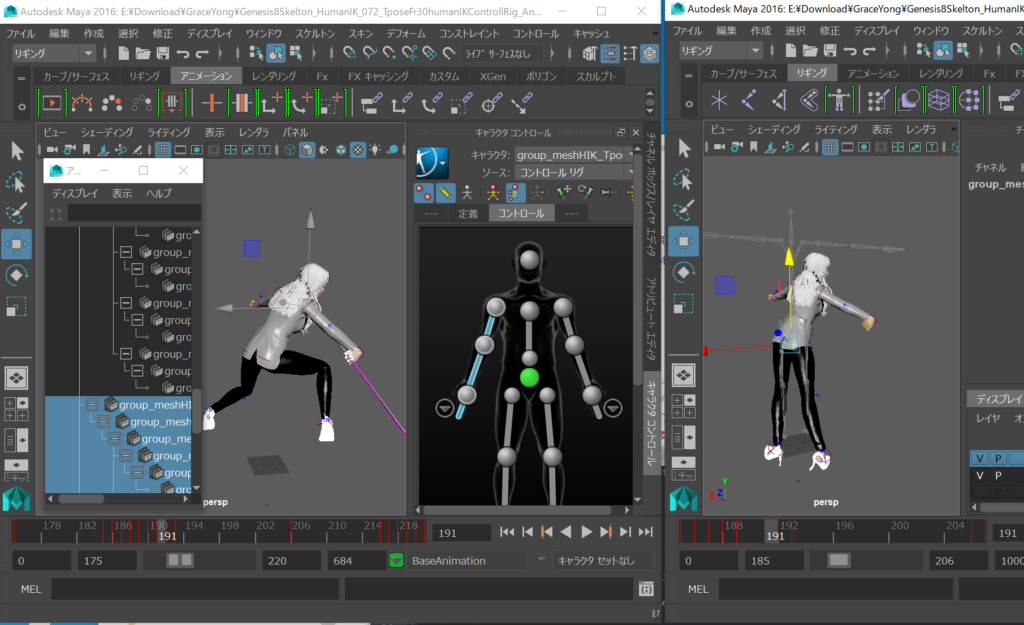
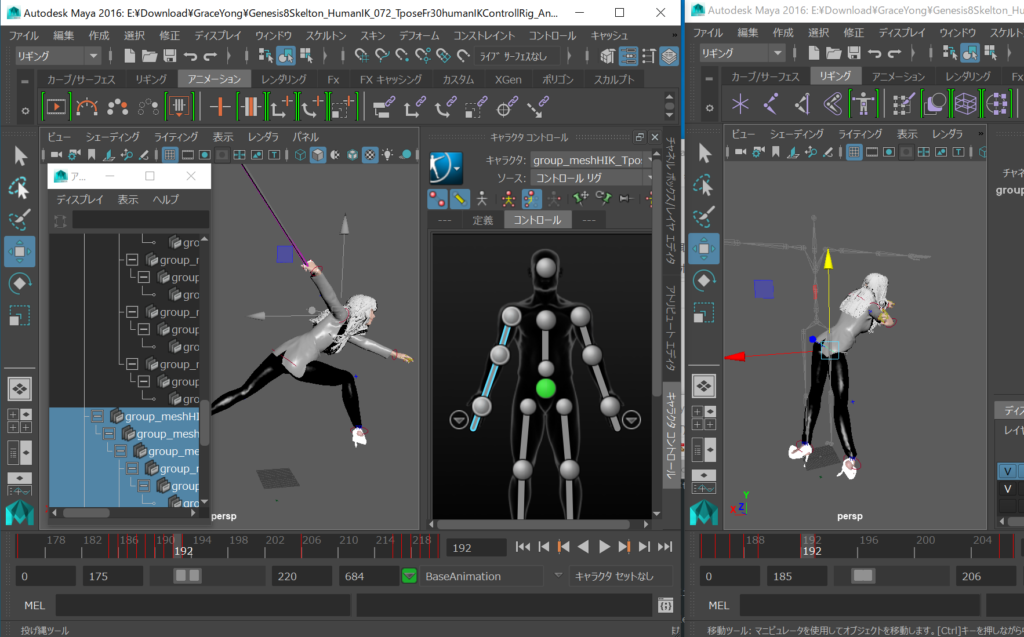
NGだったポーズ
ほとんどNGやないかい。まあ大体の大枠のポーズはインポートできてる。
腰の位置にキーが入らないというかそこらへんが問題あるHumanIKヒップエフェクターが壊れています
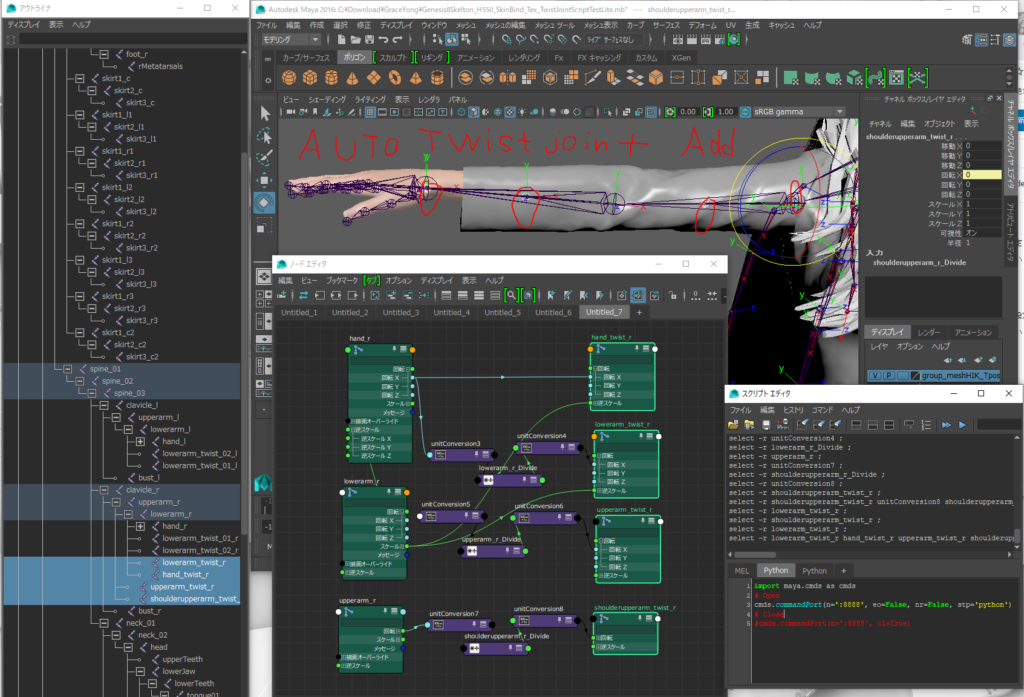
まあとりあえずソース公開
HumanIK Effecter Ctrl Animation Exporter
import maya.cmds as cmds
class HumanIK_Effecter_Ctrl_AnimationExporter:
def MainWay(self):
selects=cmds.ls(sl=True)
selectRef=selects[0]
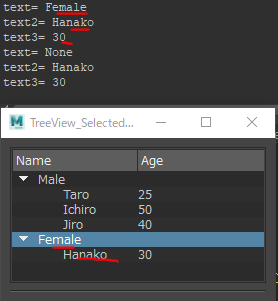
print("selectRef= "+selectRef)
_CtrlIndex=selectRef.find("_Ctrl")
print("_CtrlIndex= "+str(_CtrlIndex))
SkeletonName=selectRef[0:_CtrlIndex]
print("SkeletonName= "+SkeletonName)
HipsCtrlName=SkeletonName+"_Ctrl_Hips"
print("HipsCtrlName= "+HipsCtrlName)
startFrame=185
endFrame=206
self.keyAllLineStr=""
self.NodeAllLoop(selectRef,HipsCtrlName,startFrame,endFrame)
def key_to_add_line(self,CtrlNode,Way,key_arr):
if(str(key_arr)=="None"):
pass
else:
key_arr.insert(0, Way)
key_arr.insert(0, CtrlNode)
key_str_arr=[]
#1度数値を文字列に変換する
for v in key_arr:
str_v=str(v)
key_str_arr.append(str_v)
key_arr_str=",".join(key_str_arr)
print("key_arr_str= "+key_arr_str)
self.keyAllLineStr=self.keyAllLineStr+key_arr_str+"\n"
def NodeAllLoop(self,selectRef,HipsCtrlName,startFrame,endFrame):
# 指定したノード以下全てを検索
CtrlNodeAll=cmds.ls(HipsCtrlName,dag=1)
#CtrlNodeAll=cmds.ls(selectRef,dag=1)
print("CtrlNodeAll= "+str(CtrlNodeAll))
CtrlNodeAll.insert(0,selectRef)
for CtrlNode in CtrlNodeAll:
keyFrameData=""
#0〜20の時間範囲内のオブジェクト「surface1」のすべてのキーフレームをクエリします。
#
keyFrames_rx = cmds.keyframe( CtrlNode,at='rx', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_ry = cmds.keyframe( CtrlNode,at='ry', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_rz = cmds.keyframe( CtrlNode,at='rz', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
self.key_to_add_line(CtrlNode,"rx",keyFrames_rx)
self.key_to_add_line(CtrlNode,"ry",keyFrames_ry)
self.key_to_add_line(CtrlNode,"rz",keyFrames_rz)
#print("keyFrames_rx= "+str(keyFrames_rx))
#print("keyFrames_ry= "+str(keyFrames_ry))
#print("keyFrames_rz= "+str(keyFrames_rz))
keyFrames_tx = cmds.keyframe( CtrlNode,at='tx', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_ty = cmds.keyframe( CtrlNode,at='ty', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_tz = cmds.keyframe( CtrlNode,at='tz', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
#keyFrames=cmds.keyframe( sel、time =(185,206)、query = True、valueChange = True、timeChange = True);
self.key_to_add_line(CtrlNode,"tx",keyFrames_tx)
self.key_to_add_line(CtrlNode,"ty",keyFrames_ty)
self.key_to_add_line(CtrlNode,"tz",keyFrames_tz)
#print("keyFrames_tx= "+str(keyFrames_tx))
#print("keyFrames_ty= "+str(keyFrames_ty))
#print("keyFrames_tz= "+str(keyFrames_tz))
keyFrames_sx = cmds.keyframe( CtrlNode,at='sx', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_sy = cmds.keyframe( CtrlNode,at='sy', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_sz = cmds.keyframe( CtrlNode,at='sz', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
self.key_to_add_line(CtrlNode,"sx",keyFrames_sx)
self.key_to_add_line(CtrlNode,"sy",keyFrames_sy)
self.key_to_add_line(CtrlNode,"sz",keyFrames_sz)
print("self.keyAllLineStr ="+ self.keyAllLineStr)
self.fileWrite()
def fileWrite(self):
import codecs
fout = codecs.open('C:/Users/whaison/Documents/maya/2016/ja_JP/scripts/python/MotionMerge/p030motionbuilder_chimera_0_Start/HumanIK_Effecter_Ctrl_AnimationExporter_keyFrameData.csv', 'w', 'utf_8')
fout.write(self.keyAllLineStr)
ClassIns = HumanIK_Effecter_Ctrl_AnimationExporter()
ClassIns.MainWay()HumanIK Effecter Ctrl Animation Importer
import maya.cmds as cmds
class HumanIK_Effecter_Ctrl_AnimationImporter:
def MainWay(self):
selects=cmds.ls(sl=True)
selectRef=selects[0]
print("selectRef= "+selectRef)
_CtrlIndex=selectRef.find("_Ctrl")
print("_CtrlIndex= "+str(_CtrlIndex))
SkeletonName=selectRef[0:_CtrlIndex]
print("SkeletonName= "+SkeletonName)
HipsCtrlName=SkeletonName+"_Ctrl_Hips"
print("HipsCtrlName= "+HipsCtrlName)
startFrame=185
endFrame=206
self.keyAllLineStr=""
#self.NodeAllLoop(HipsCtrlName,startFrame,endFrame,)
self.fileReader()
def fileReader(self):
import codecs
fin = codecs.open('C:/Users/whaison/Documents/maya/2016/ja_JP/scripts/python/MotionMerge/p030motionbuilder_chimera_0_Start/HumanIK_Effecter_Ctrl_AnimationExporter_keyFrameData.csv', 'r', 'utf_8')
for line in fin:
print("line= "+line)
if(line==""):
pass
else:
self.line_to_setkeyframe(line)
def line_to_setkeyframe(self,line):
key_arr=line.split(",")
CtrlName=key_arr[0]
print("CtrlName= "+CtrlName)
Way=key_arr[1]
print("Way= "+Way)
key_arr_len=len(key_arr)
frameStr=""
valueStr=""
for i in range(2,key_arr_len):
val=key_arr[i]
if i % 2 == 0:
print('frame= '+val)
frameStr=val
framefloat=float(frameStr)
else:
print('Value= '+val)
valueStr=val
valuefloat=float(valueStr)
print('cmds.setKeyframe( '+CtrlName+","+Way+",t="+str(framefloat)+",v="+str(valuefloat)+")")
try:
cmds.setKeyframe( CtrlName, attribute=Way, t=framefloat,v=valuefloat)
except OSError as err:
print("OS error: {0}".format(err))
except ValueError:
print("Could not convert data to an integer.")
except:
print("Unexpected error:", sys.exc_info()[0])
raise
def NodeAllLoop(self,HipsCtrlNam,startFrame,endFramee):
# 指定したノード以下全てを検索
CtrlNodeAll=cmds.ls(HipsCtrlName,dag=1)
print("CtrlNodeAll= "+str(CtrlNodeAll))
for CtrlNode in CtrlNodeAll:
pass
"""
keyFrames_rx= [185.0, 21.089741780299963, 186.0, 21.15808805587963, 187.0, 21.57269253024709, 188.0, 15.651666434240237, 189.0, -27.60824368710669, 190.0, -66.8640151602632, 191.0, -3.6033652533432057, 192.0, -12.976039746033836, 193.0, 21.089741780299963, 206.0, 21.089741780299963]
keyFrames_ry= [185.0, 64.06950181042265, 186.0, -43.06801204369242, 187.0, -42.23534535644165, 188.0, 6.3003207259776, 189.0, -18.619267402281043, 190.0, -46.39726736167605, 191.0, 7.25455667934068, 192.0, 22.112923704038533, 193.0, 64.06950181042265, 206.0, 64.06950181042265]
keyFrames_rz= [185.0, -39.35273351243995, 186.0, -71.88505367073185, 187.0, -71.23919938208138, 188.0, -12.884469861914607, 189.0, -23.728143045065494, 190.0, 1.5441603410596807, 191.0, -29.38106191819622, 192.0, 27.959038658924545, 193.0, -39.35273351243995, 206.0, -39.35273351243995]
#tx
keyFrames_tx= [185.0, -31.063541412353516, 186.0, 13.386266787875757, 187.0, 12.569612782818957, 188.0, -68.13177446430325, 189.0, -14.078931727868042, 190.0, 34.98399964606946, 191.0, -58.035783944634446, 192.0, 38.62583642912938, 193.0, -31.063541412353516, 206.0, -31.063541412353516]
keyFrames_ty= [185.0, 103.91255187988281, 186.0, 160.48102799110984, 187.0, 135.33789404307092, 188.0, 123.42318340077544, 189.0, 143.61781646990772, 190.0, 162.44752777221774, 191.0, 147.59765966522042, 192.0, 149.99067818831213, 193.0, 103.91255187988281, 206.0, 103.91255187988281]
keyFrames_tz= [185.0, -13.255008697509766, 186.0, 126.81360281638925, 187.0, 114.12469622889218, 188.0, 62.25401426920391, 189.0, 116.16546039338427, 190.0, 124.82832123482547, 191.0, 79.97223357269715, 192.0, 43.964009286900165, 193.0, -13.255008697509766, 206.0, -13.255008697509766]
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_Reference', attribute='translateX', t=186.0,v=-27.940739594423125,)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_Reference', attribute='rotationX', t=186.0,v=-27.940739594423125,)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_Reference', attribute='rx', t=186.0,v=-27.940739594423125,)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightArm', attribute='rx', t=185.0,v=21.15808805587963)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightArm', attribute='ry', t=185.0,v=-43.06801204369242)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightArm', attribute='rz', t=185.0,v=-71.88505367073185)
#translate
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightWristEffector', attribute='tx', t=186.0,v= 13.386266787875757)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightWristEffector', attribute='ty', t=186.0,v=160.48102799110984)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightWristEffector', attribute='tz', t=186.0,v=126.81360281638925)
"""
ClassIns=HumanIK_Effecter_Ctrl_AnimationImporter()
ClassIns.MainWay()