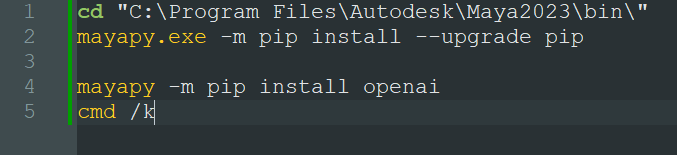
openai : error_code=None error_message=’You exceeded your current quota, please check your plan and billing details.’ error_param=None error_type=insufficient_quota message=’OpenAI API error received’ stream_error=False
エラー: RateLimitError: file C:\Program Files\Autodesk\Maya2023\Python\lib\site-packages\openai\api_requestor.py line 679: You exceeded your current quota, please check your plan and billing details.
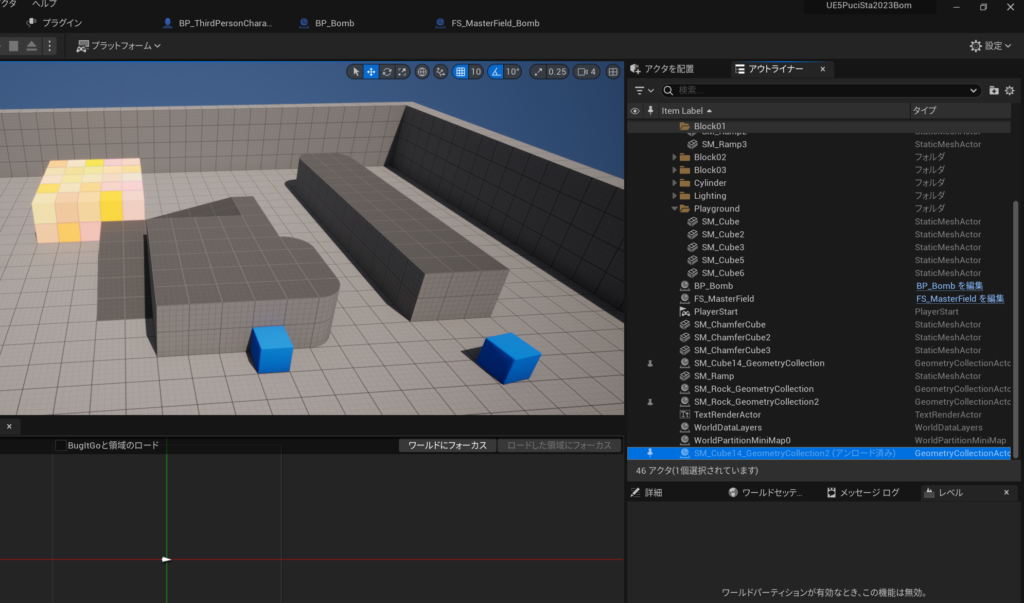
Log Python: Automation Library: Failed to convert parameter ‘camera’ when calling function ‘AutomationBlueprintFunctionLibrary.TakeHighResScreenshot’ on ‘Default__AutomationBlueprintFunctionLibrary’ TypeError: NativizeProperty: Cannot nativize ‘SceneCaptureActor’ as ‘Camera’ (ObjectProperty) TypeError: NativizeObject: Cannot nativize ‘SceneCaptureActor’ as ‘Object’ (allowed Class type: ‘CameraActor’)
IS FIX Code
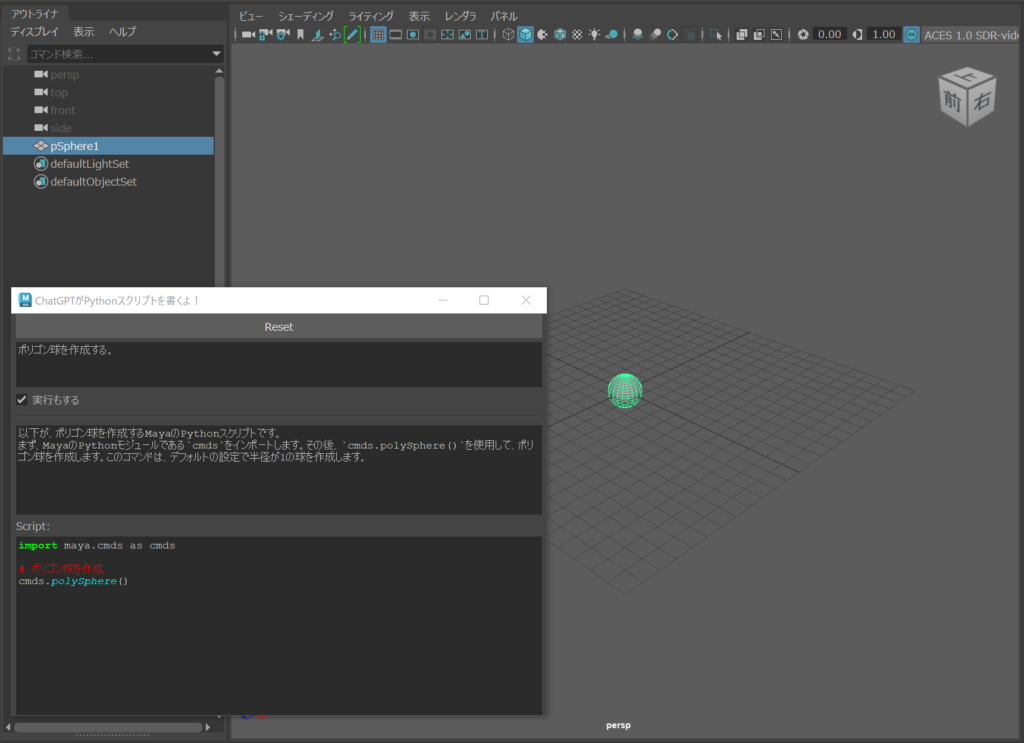
import unreal
import time
class OnTick(object):
""" Register a function and run it on tick, """
def __init__(self):
# make a generator function so we can call next on it,
EditorLevelLibrary = unreal.EditorLevelLibrary()
all_level_actors=EditorLevelLibrary.get_all_level_actors()
CameraActors=[]
for actor in all_level_actors:
#CameraBool=actor.find_camera_component_when_view_target
CameraComponent=actor.get_component_by_class(unreal.CameraComponent)
#print("CameraComponent="+str(CameraComponent))
#className=CameraComponent.get_class()
#print("CameraComponent.get_class() ="+str(className))
if(str(CameraComponent)=="None"):
pass
else:
#if(str(CameraComponent) in "CineCameraComponent"):
# pass
#else:
CameraActors.append(actor)
self.CameraActors=CameraActors
#self.actors = (actor for actor in unreal.EditorLevelLibrary.get_selected_level_actors())
self.actors = iter(CameraActors)
self.tickcount=0
self.CapturedCount=0
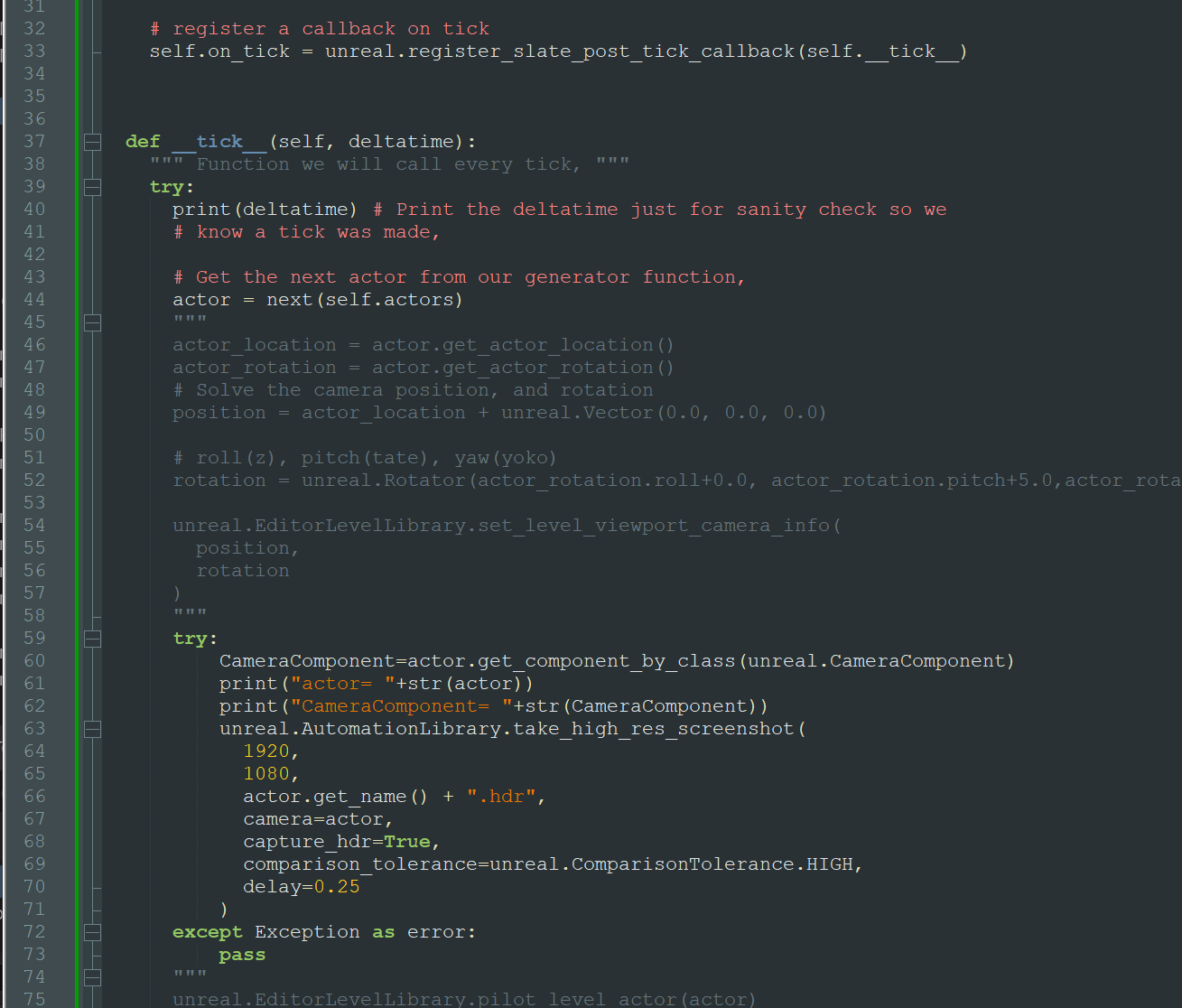
# register a callback on tick
self.on_tick = unreal.register_slate_post_tick_callback(self.__tick__)
def __tick__(self, deltatime):
""" Function we will call every tick, """
try:
print(deltatime) # Print the deltatime just for sanity check so we
# know a tick was made,
# Get the next actor from our generator function,
actor = next(self.actors)
"""
actor_location = actor.get_actor_location()
actor_rotation = actor.get_actor_rotation()
# Solve the camera position, and rotation
position = actor_location + unreal.Vector(0.0, 0.0, 0.0)
# roll(z), pitch(tate), yaw(yoko)
rotation = unreal.Rotator(actor_rotation.roll+0.0, actor_rotation.pitch+5.0,actor_rotation.yaw+0.0)
unreal.EditorLevelLibrary.set_level_viewport_camera_info(
position,
rotation
)
"""
errorBool=False
try:
CameraComponent=actor.get_component_by_class(unreal.CameraComponent)
print("actor= "+str(actor))
print("CameraComponent= "+str(CameraComponent))
unreal.AutomationLibrary.take_high_res_screenshot(
1920,
1080,
str(self.CapturedCount)+"_"+actor.get_name() + ".hdr",
camera=actor,
capture_hdr=True,
comparison_tolerance=unreal.ComparisonTolerance.HIGH
)
errorBool=False
except Exception as error:
errorBool=True
pass
if(errorBool==False):
# Count
self.CapturedCount=self.CapturedCount+1
"""
unreal.EditorLevelLibrary.pilot_level_actor(actor)
unreal.EditorLevelLibrary.editor_set_game_view(True)
# Take the screenshot,
unreal.AutomationLibrary.take_high_res_screenshot(
1920,
1080,
actor.get_name() + ".hdr",
camera=actor,
capture_hdr=True,
comparison_tolerance=unreal.ComparisonTolerance.HIGH,
delay=0.25
)
unreal.EditorLevelLibrary.eject_pilot_level_actor()
"""
# Count
self.tickcount=self.tickcount+1
CameraActors=self.CameraActors
CameraActorsLen=len(CameraActors)
endActor=CameraActors[CameraActorsLen-1]
print("self.tickcount="+str(self.tickcount)+" :CameraActorsLen="+str(CameraActorsLen))
if(str(self.tickcount)==str(CameraActorsLen)):
print("finish")
unreal.unregister_slate_post_tick_callback(self.on_tick)
except Exception as error:
#pass
print(error)
try:
unreal.unregister_slate_post_tick_callback(self.on_tick)
except Exception as error:
pass
#if __name__ == '__main__':
instance = OnTick()