HumanIKのコントローラーのRIGアニメーション作成は楽しいので昔のKeyFrameを新しいファイルに入れたいときに使う。
animでもatomでも持っていけなかったのでに作るしかないかーと思った。
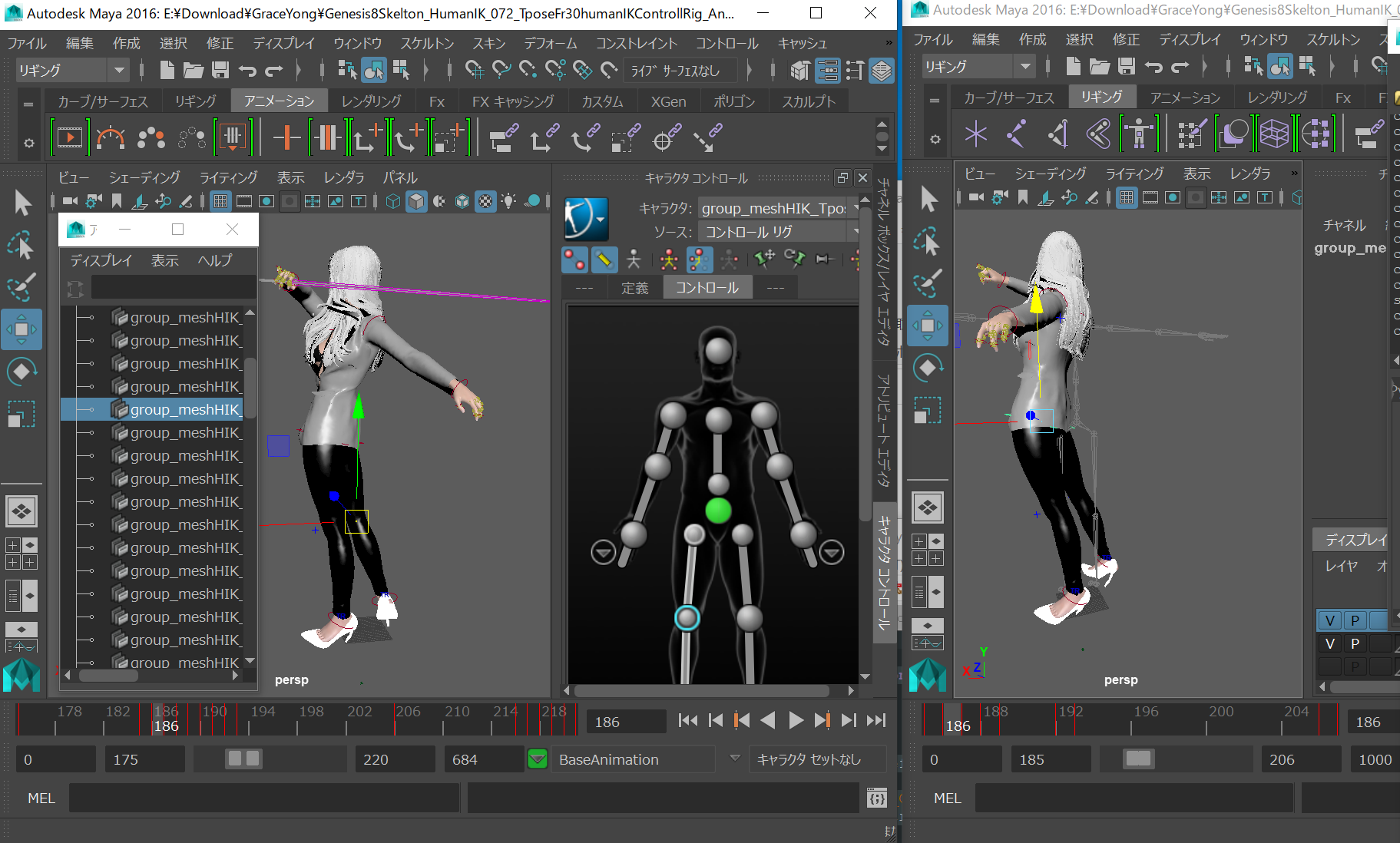
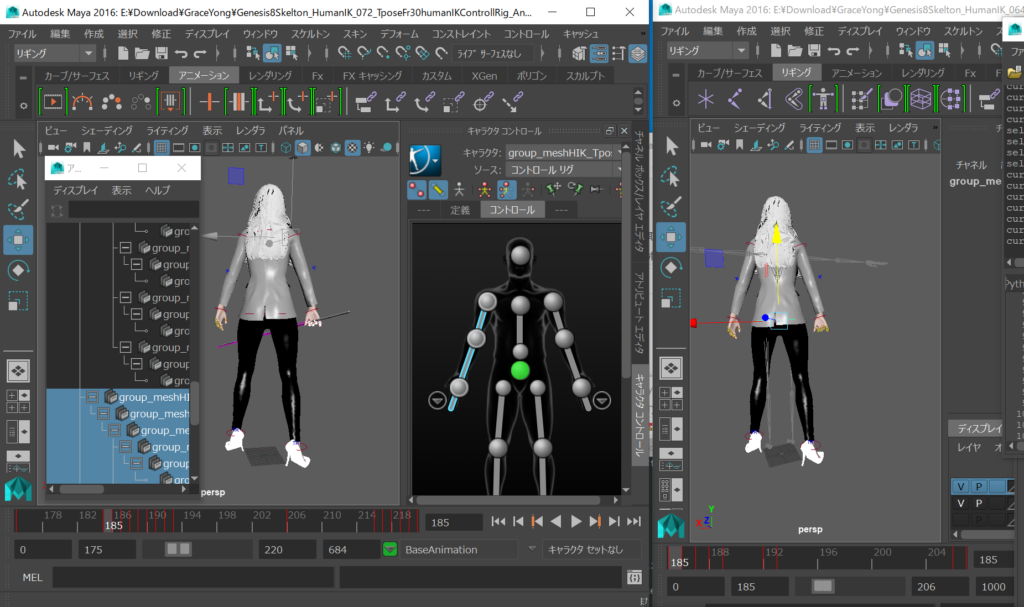
どうしてもRigなので引っ張られている分ポーズがまんま持っていけるわけではないので確認と調整が必要、ポーズによってはそのまま使える
OKなポーズ
NGだったポーズ
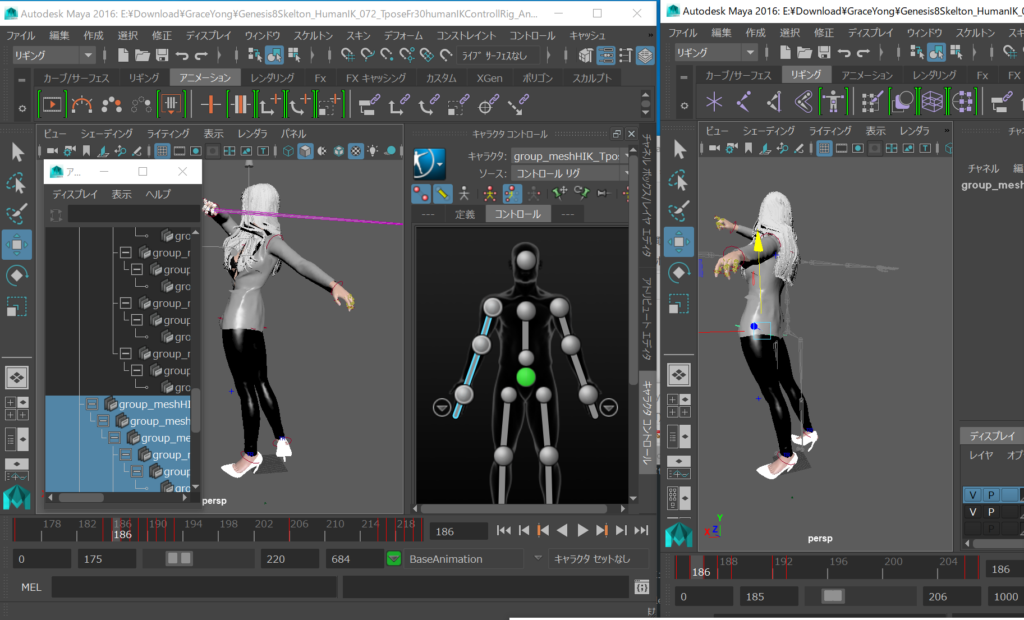
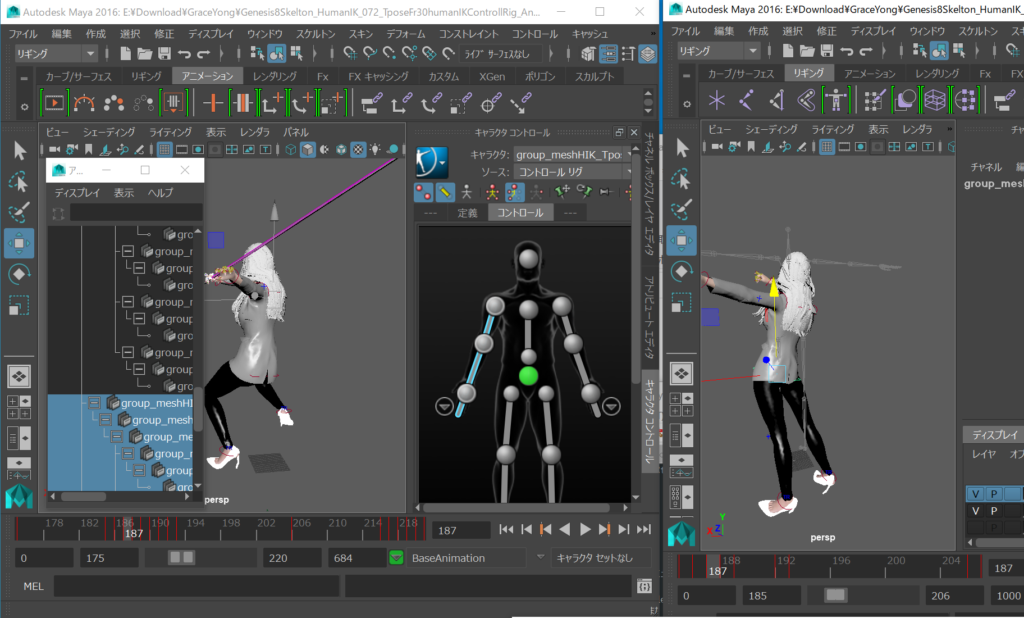
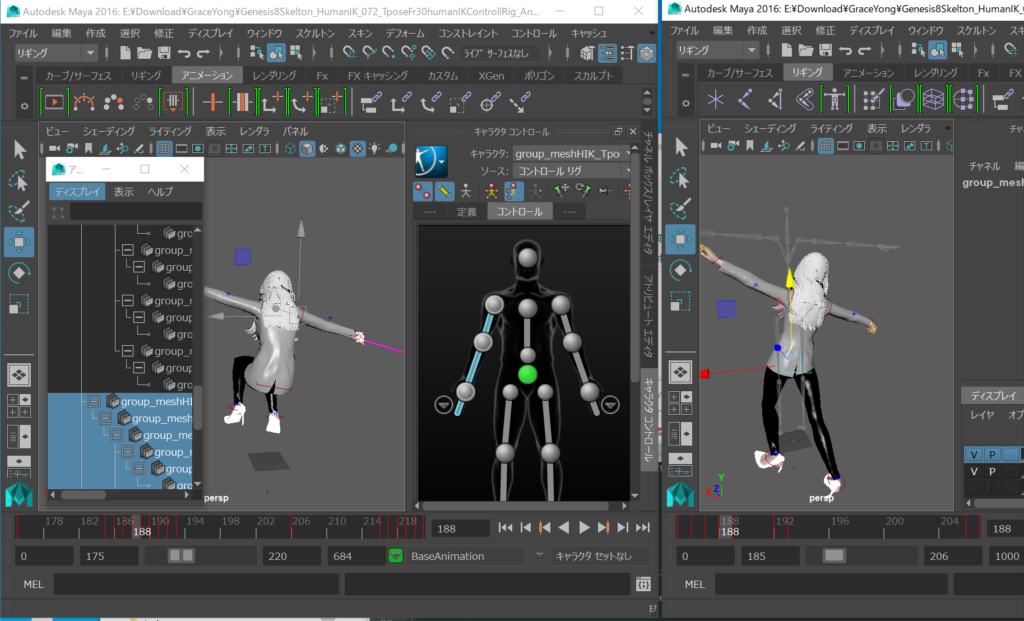
ほとんどNGやないかい。まあ大体の大枠のポーズはインポートできてる。
膝のまがりとかがダメだった。
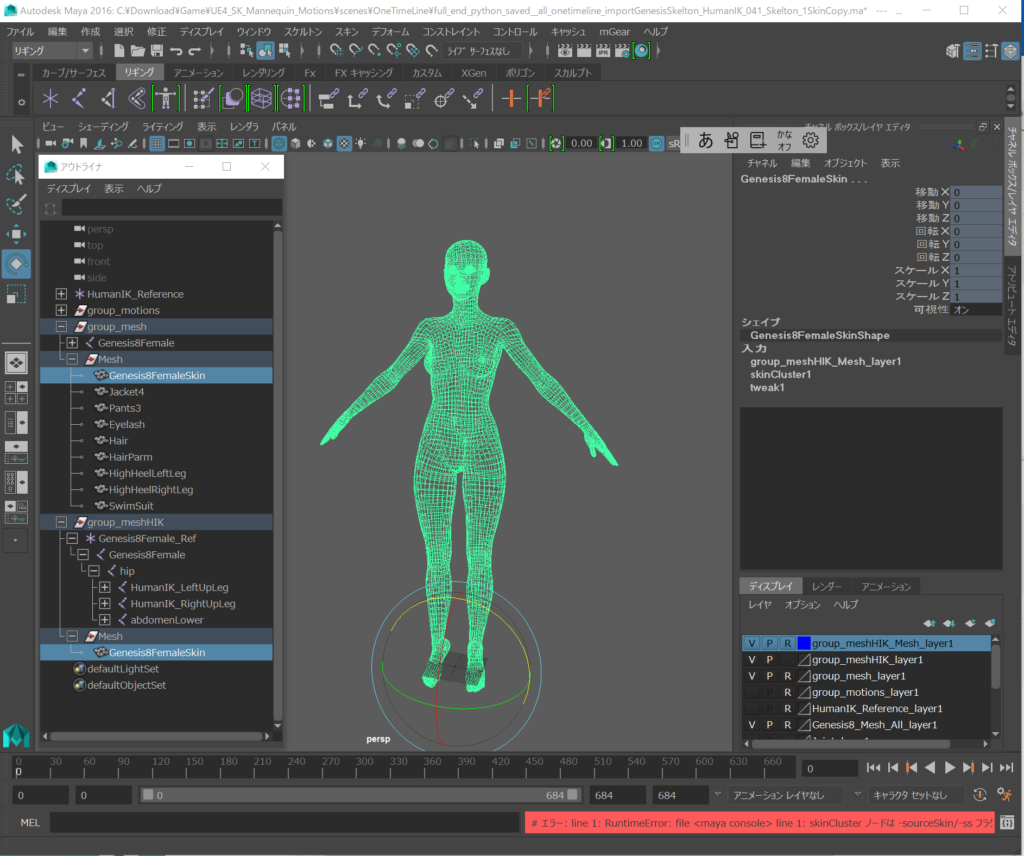
腰の位置にキーが入らないというかそこらへんが問題ある
HumanIKのHipはへんな記事があった。
HumanIKヒップエフェクターが壊れています
https://forums.cgsociety.org/t/humanik-hip-effector-broken/1583635/3
によると設定をデフォルトにすると直るとか直らないとか神のみぞ知るとか。。
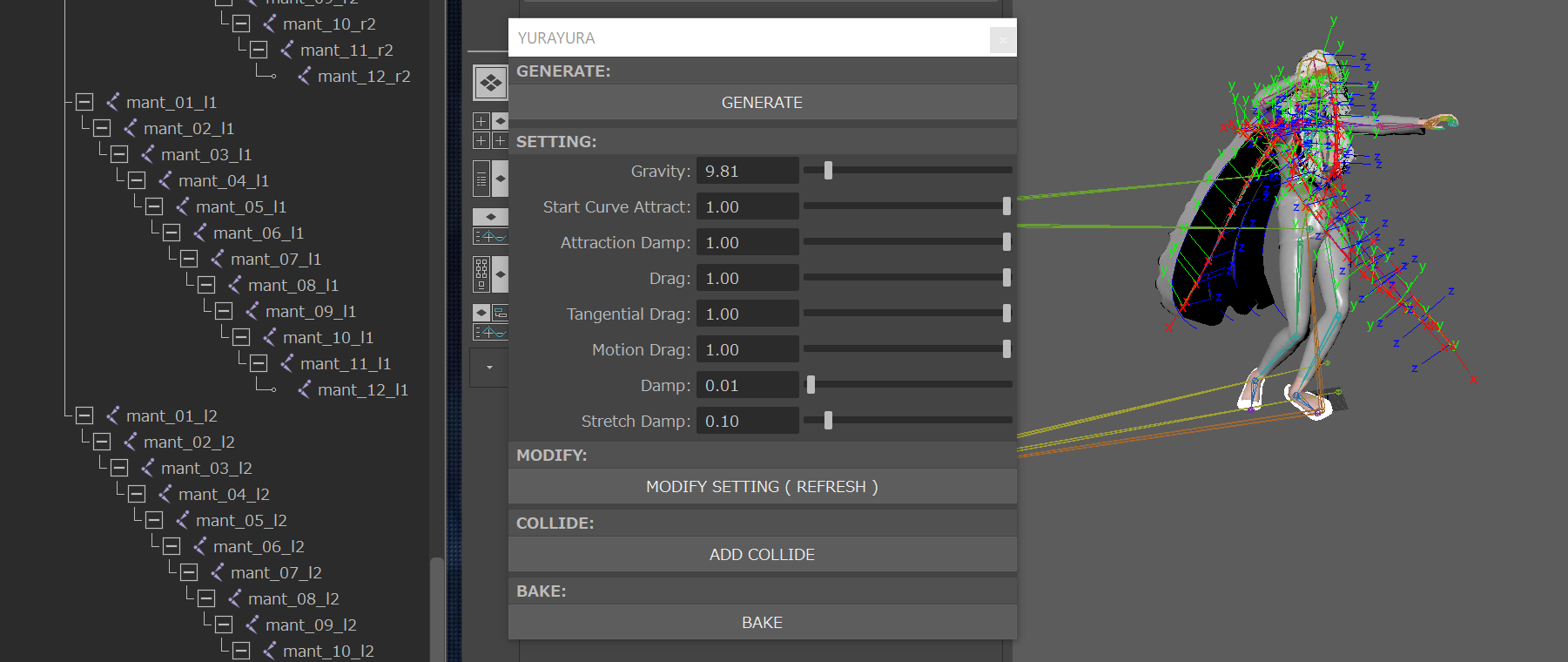
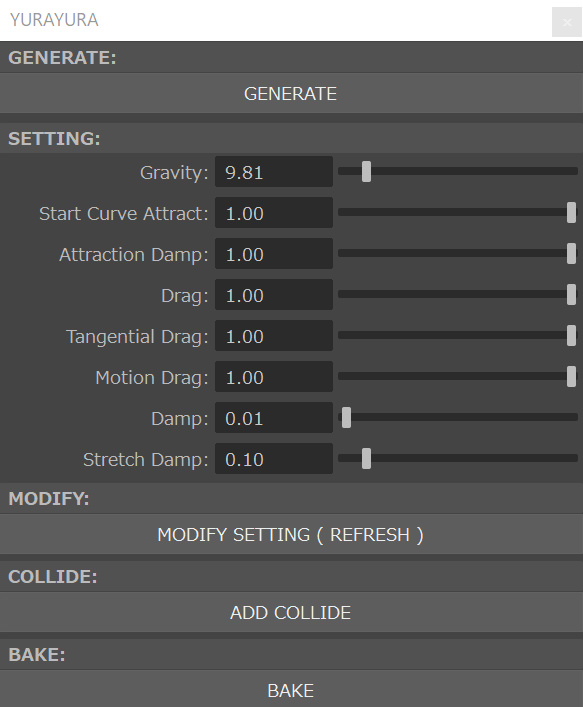
まあとりあえずソース公開
HumanIK Effecter Ctrl Animation Exporter
import maya.cmds as cmds
class HumanIK_Effecter_Ctrl_AnimationExporter:
def MainWay(self):
selects=cmds.ls(sl=True)
selectRef=selects[0]
print("selectRef= "+selectRef)
_CtrlIndex=selectRef.find("_Ctrl")
print("_CtrlIndex= "+str(_CtrlIndex))
SkeletonName=selectRef[0:_CtrlIndex]
print("SkeletonName= "+SkeletonName)
HipsCtrlName=SkeletonName+"_Ctrl_Hips"
print("HipsCtrlName= "+HipsCtrlName)
startFrame=185
endFrame=206
self.keyAllLineStr=""
self.NodeAllLoop(selectRef,HipsCtrlName,startFrame,endFrame)
def key_to_add_line(self,CtrlNode,Way,key_arr):
if(str(key_arr)=="None"):
pass
else:
key_arr.insert(0, Way)
key_arr.insert(0, CtrlNode)
key_str_arr=[]
#1度数値を文字列に変換する
for v in key_arr:
str_v=str(v)
key_str_arr.append(str_v)
key_arr_str=",".join(key_str_arr)
print("key_arr_str= "+key_arr_str)
self.keyAllLineStr=self.keyAllLineStr+key_arr_str+"\n"
def NodeAllLoop(self,selectRef,HipsCtrlName,startFrame,endFrame):
# 指定したノード以下全てを検索
CtrlNodeAll=cmds.ls(HipsCtrlName,dag=1)
#CtrlNodeAll=cmds.ls(selectRef,dag=1)
print("CtrlNodeAll= "+str(CtrlNodeAll))
CtrlNodeAll.insert(0,selectRef)
for CtrlNode in CtrlNodeAll:
keyFrameData=""
#0〜20の時間範囲内のオブジェクト「surface1」のすべてのキーフレームをクエリします。
#
keyFrames_rx = cmds.keyframe( CtrlNode,at='rx', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_ry = cmds.keyframe( CtrlNode,at='ry', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_rz = cmds.keyframe( CtrlNode,at='rz', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
self.key_to_add_line(CtrlNode,"rx",keyFrames_rx)
self.key_to_add_line(CtrlNode,"ry",keyFrames_ry)
self.key_to_add_line(CtrlNode,"rz",keyFrames_rz)
#print("keyFrames_rx= "+str(keyFrames_rx))
#print("keyFrames_ry= "+str(keyFrames_ry))
#print("keyFrames_rz= "+str(keyFrames_rz))
keyFrames_tx = cmds.keyframe( CtrlNode,at='tx', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_ty = cmds.keyframe( CtrlNode,at='ty', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_tz = cmds.keyframe( CtrlNode,at='tz', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
#keyFrames=cmds.keyframe( sel、time =(185,206)、query = True、valueChange = True、timeChange = True);
self.key_to_add_line(CtrlNode,"tx",keyFrames_tx)
self.key_to_add_line(CtrlNode,"ty",keyFrames_ty)
self.key_to_add_line(CtrlNode,"tz",keyFrames_tz)
#print("keyFrames_tx= "+str(keyFrames_tx))
#print("keyFrames_ty= "+str(keyFrames_ty))
#print("keyFrames_tz= "+str(keyFrames_tz))
keyFrames_sx = cmds.keyframe( CtrlNode,at='sx', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_sy = cmds.keyframe( CtrlNode,at='sy', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
keyFrames_sz = cmds.keyframe( CtrlNode,at='sz', time=(startFrame,endFrame), query=True, valueChange=True, timeChange=True);
self.key_to_add_line(CtrlNode,"sx",keyFrames_sx)
self.key_to_add_line(CtrlNode,"sy",keyFrames_sy)
self.key_to_add_line(CtrlNode,"sz",keyFrames_sz)
print("self.keyAllLineStr ="+ self.keyAllLineStr)
self.fileWrite()
def fileWrite(self):
import codecs
fout = codecs.open('C:/Users/whaison/Documents/maya/2016/ja_JP/scripts/python/MotionMerge/p030motionbuilder_chimera_0_Start/HumanIK_Effecter_Ctrl_AnimationExporter_keyFrameData.csv', 'w', 'utf_8')
fout.write(self.keyAllLineStr)
ClassIns = HumanIK_Effecter_Ctrl_AnimationExporter()
ClassIns.MainWay()
HumanIK Effecter Ctrl Animation Importer
import maya.cmds as cmds
class HumanIK_Effecter_Ctrl_AnimationImporter:
def MainWay(self):
selects=cmds.ls(sl=True)
selectRef=selects[0]
print("selectRef= "+selectRef)
_CtrlIndex=selectRef.find("_Ctrl")
print("_CtrlIndex= "+str(_CtrlIndex))
SkeletonName=selectRef[0:_CtrlIndex]
print("SkeletonName= "+SkeletonName)
HipsCtrlName=SkeletonName+"_Ctrl_Hips"
print("HipsCtrlName= "+HipsCtrlName)
startFrame=185
endFrame=206
self.keyAllLineStr=""
#self.NodeAllLoop(HipsCtrlName,startFrame,endFrame,)
self.fileReader()
def fileReader(self):
import codecs
fin = codecs.open('C:/Users/whaison/Documents/maya/2016/ja_JP/scripts/python/MotionMerge/p030motionbuilder_chimera_0_Start/HumanIK_Effecter_Ctrl_AnimationExporter_keyFrameData.csv', 'r', 'utf_8')
for line in fin:
print("line= "+line)
if(line==""):
pass
else:
self.line_to_setkeyframe(line)
def line_to_setkeyframe(self,line):
key_arr=line.split(",")
CtrlName=key_arr[0]
print("CtrlName= "+CtrlName)
Way=key_arr[1]
print("Way= "+Way)
key_arr_len=len(key_arr)
frameStr=""
valueStr=""
for i in range(2,key_arr_len):
val=key_arr[i]
if i % 2 == 0:
print('frame= '+val)
frameStr=val
framefloat=float(frameStr)
else:
print('Value= '+val)
valueStr=val
valuefloat=float(valueStr)
print('cmds.setKeyframe( '+CtrlName+","+Way+",t="+str(framefloat)+",v="+str(valuefloat)+")")
try:
cmds.setKeyframe( CtrlName, attribute=Way, t=framefloat,v=valuefloat)
except OSError as err:
print("OS error: {0}".format(err))
except ValueError:
print("Could not convert data to an integer.")
except:
print("Unexpected error:", sys.exc_info()[0])
raise
def NodeAllLoop(self,HipsCtrlNam,startFrame,endFramee):
# 指定したノード以下全てを検索
CtrlNodeAll=cmds.ls(HipsCtrlName,dag=1)
print("CtrlNodeAll= "+str(CtrlNodeAll))
for CtrlNode in CtrlNodeAll:
pass
"""
keyFrames_rx= [185.0, 21.089741780299963, 186.0, 21.15808805587963, 187.0, 21.57269253024709, 188.0, 15.651666434240237, 189.0, -27.60824368710669, 190.0, -66.8640151602632, 191.0, -3.6033652533432057, 192.0, -12.976039746033836, 193.0, 21.089741780299963, 206.0, 21.089741780299963]
keyFrames_ry= [185.0, 64.06950181042265, 186.0, -43.06801204369242, 187.0, -42.23534535644165, 188.0, 6.3003207259776, 189.0, -18.619267402281043, 190.0, -46.39726736167605, 191.0, 7.25455667934068, 192.0, 22.112923704038533, 193.0, 64.06950181042265, 206.0, 64.06950181042265]
keyFrames_rz= [185.0, -39.35273351243995, 186.0, -71.88505367073185, 187.0, -71.23919938208138, 188.0, -12.884469861914607, 189.0, -23.728143045065494, 190.0, 1.5441603410596807, 191.0, -29.38106191819622, 192.0, 27.959038658924545, 193.0, -39.35273351243995, 206.0, -39.35273351243995]
#tx
keyFrames_tx= [185.0, -31.063541412353516, 186.0, 13.386266787875757, 187.0, 12.569612782818957, 188.0, -68.13177446430325, 189.0, -14.078931727868042, 190.0, 34.98399964606946, 191.0, -58.035783944634446, 192.0, 38.62583642912938, 193.0, -31.063541412353516, 206.0, -31.063541412353516]
keyFrames_ty= [185.0, 103.91255187988281, 186.0, 160.48102799110984, 187.0, 135.33789404307092, 188.0, 123.42318340077544, 189.0, 143.61781646990772, 190.0, 162.44752777221774, 191.0, 147.59765966522042, 192.0, 149.99067818831213, 193.0, 103.91255187988281, 206.0, 103.91255187988281]
keyFrames_tz= [185.0, -13.255008697509766, 186.0, 126.81360281638925, 187.0, 114.12469622889218, 188.0, 62.25401426920391, 189.0, 116.16546039338427, 190.0, 124.82832123482547, 191.0, 79.97223357269715, 192.0, 43.964009286900165, 193.0, -13.255008697509766, 206.0, -13.255008697509766]
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_Reference', attribute='translateX', t=186.0,v=-27.940739594423125,)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_Reference', attribute='rotationX', t=186.0,v=-27.940739594423125,)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_Reference', attribute='rx', t=186.0,v=-27.940739594423125,)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightArm', attribute='rx', t=185.0,v=21.15808805587963)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightArm', attribute='ry', t=185.0,v=-43.06801204369242)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightArm', attribute='rz', t=185.0,v=-71.88505367073185)
#translate
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightWristEffector', attribute='tx', t=186.0,v= 13.386266787875757)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightWristEffector', attribute='ty', t=186.0,v=160.48102799110984)
cmds.setKeyframe( 'group_meshHIK_TposeSK_Ctrl_RightWristEffector', attribute='tz', t=186.0,v=126.81360281638925)
"""
ClassIns=HumanIK_Effecter_Ctrl_AnimationImporter()
ClassIns.MainWay()