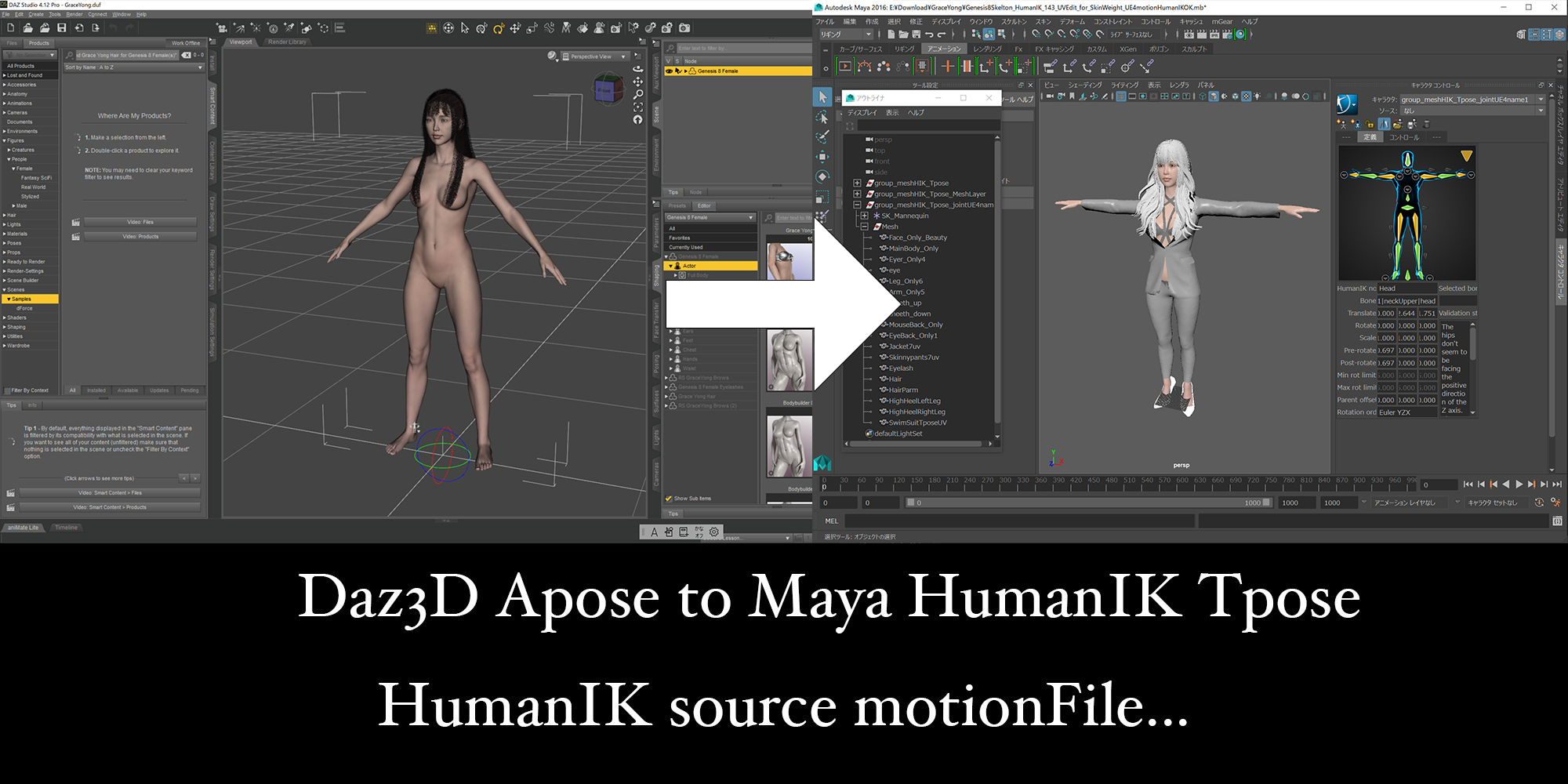
AポーズからTポーズにしてモーションの流し込みやすいMaya HumanIKスケルトンにキレイにモデルを合わせる方法1~Duplicateで固まるメッシュ※0 を使う方法~
きれいにというのは「もとのAポーズのモデルのスキンウェイトをつかってTポーズにしようとしてる」と「新しいjointはできるだけHumanIKのジョイントで作ることでHumanIKでバグらせないことが目標」
大きな流れは
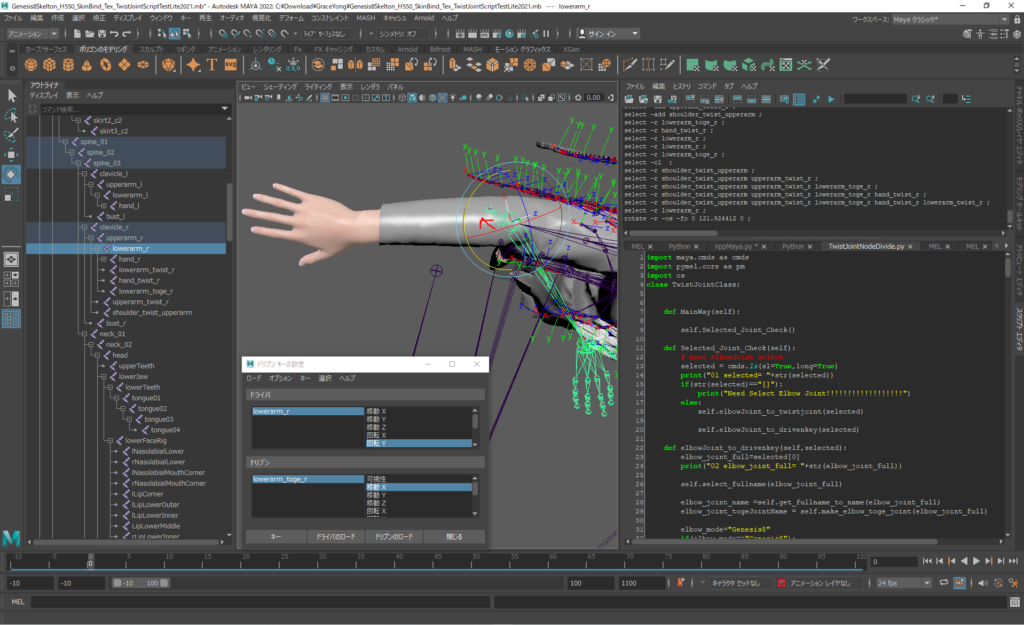
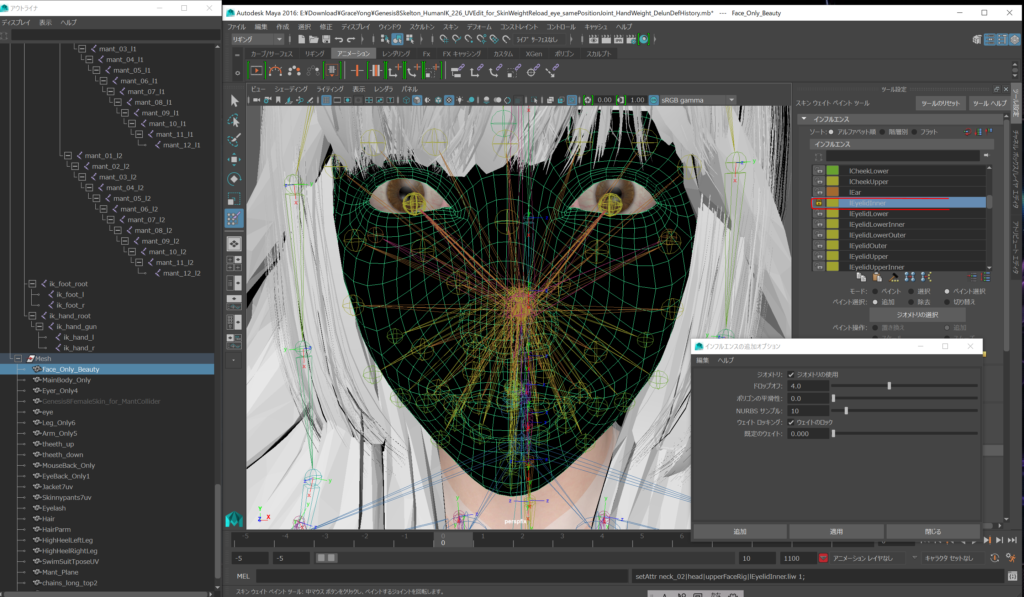
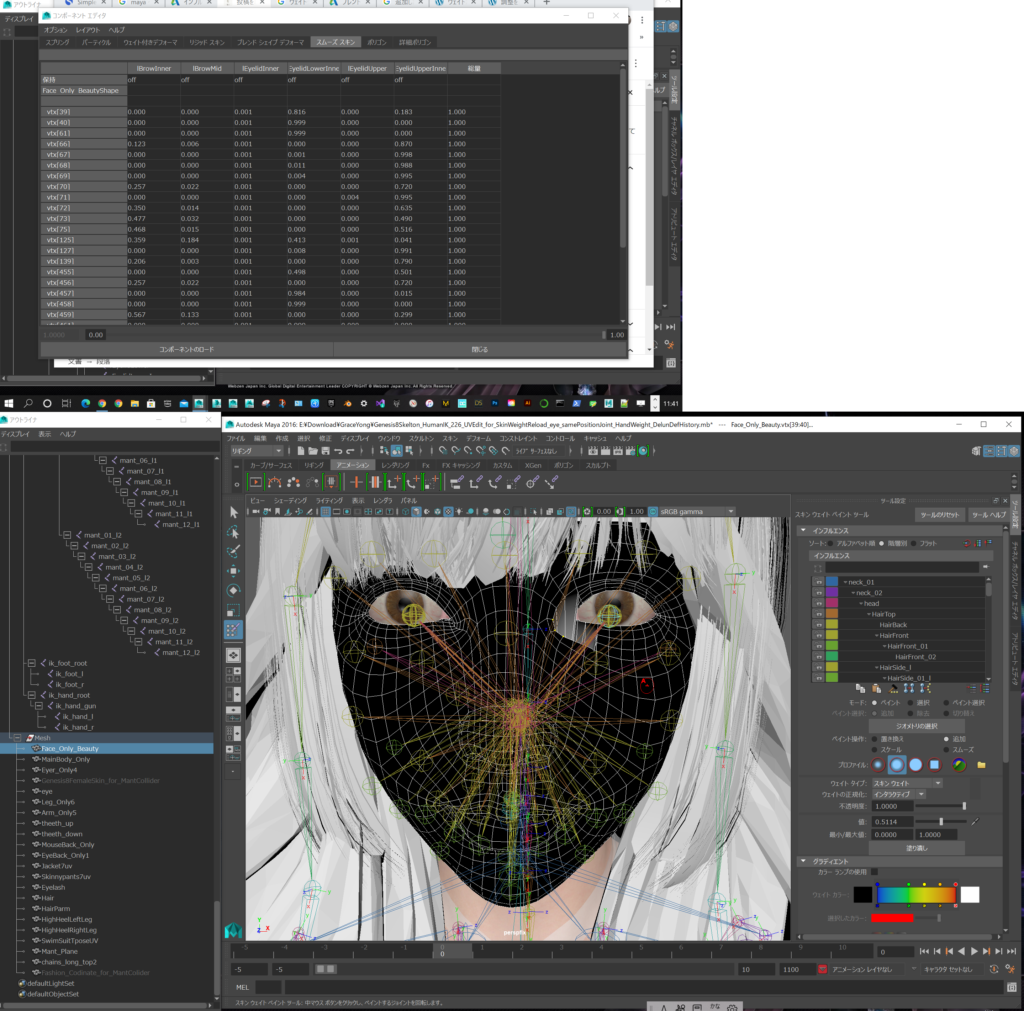
1,AposeモデルにMeshEdit用のApose JointをHumanIKスケルトンを複製して作る
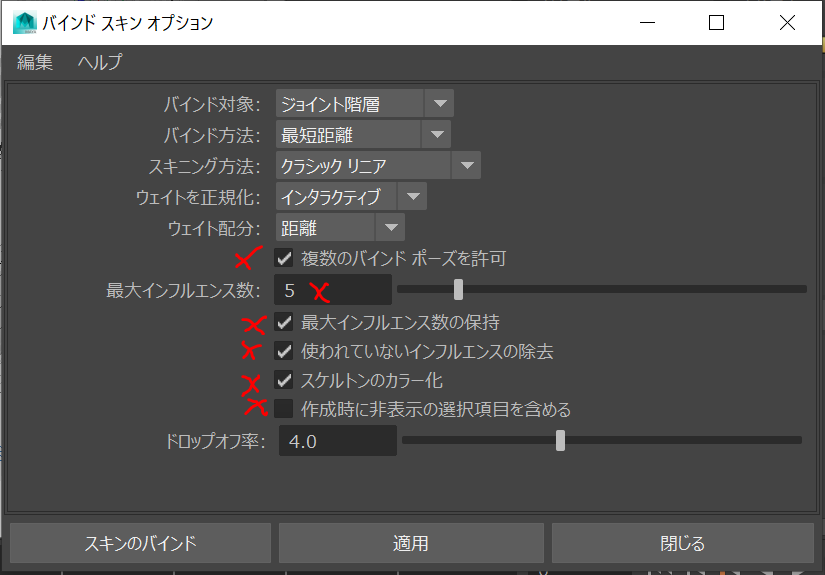
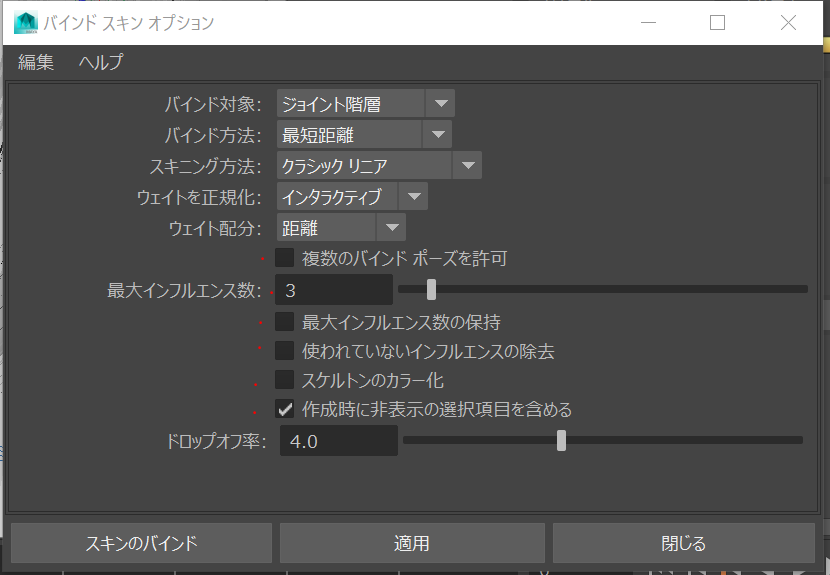
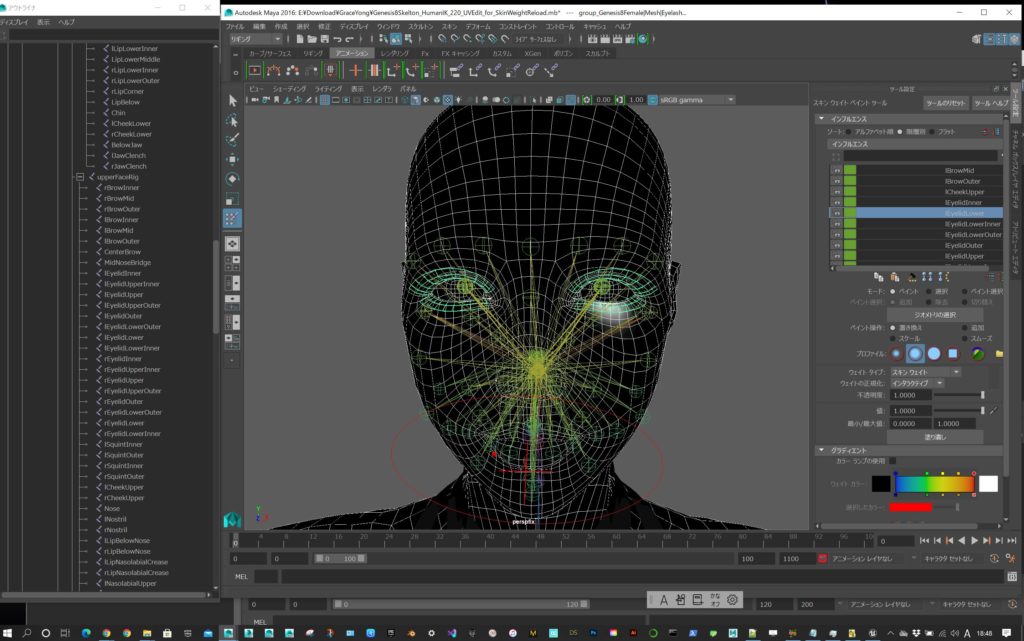
3,Apose MeshにあわせたそのMeshEdit用のApose jointとApose meshをスキンのバインドする
4.1見る用にHumanIKスケルトンデフォルトのTposeを複製して作る
6.Cのスキンバインドを外す、
8,groupMeshHIK_TposeSKに2段目のソースにアニメーションを指定してモーションを流し込む 詳細は※2
8f2ここまでやったらアニメーションレイヤー使うかどうかはモーション作業内容次第。
コントロールリグアニメーションを直接編集しなおす。 10a groupMeshHIK_TposeSK にコントローラのアニメーションをベイクします。
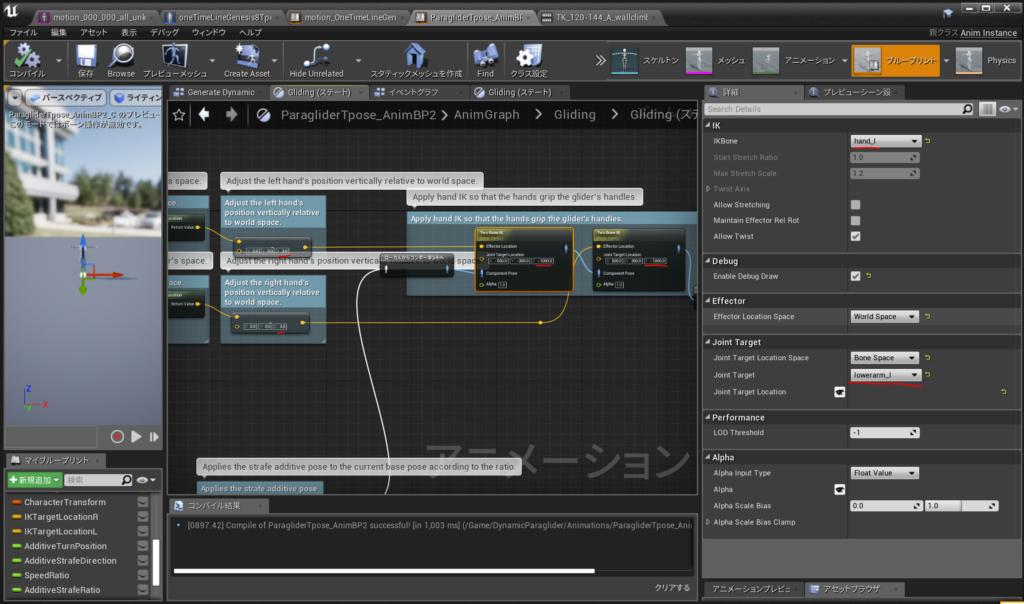
10c,UE4で編集>プラグイン>プラグインウィンドウで検索pythonと入力し
10d.UE4で
10d.アニメーションスプリットツールでインポートします。
UE4_SK_Mannequin_Motions\script\
それをすべて選択して
モーションを修正する場合には
コントロールリグアニメーションを直接編集しなおす。 と思ったが
※0 Duplicateで固まるメッシュ というのは スキンバインドしてアニメーションさせたMeshをモーション後のフレームでDuplicate するとその複製されたメッシュがその形状のまま固まる現象をいう。ちょっとしたバグなのか仕様なのかわからない。都合がいい。
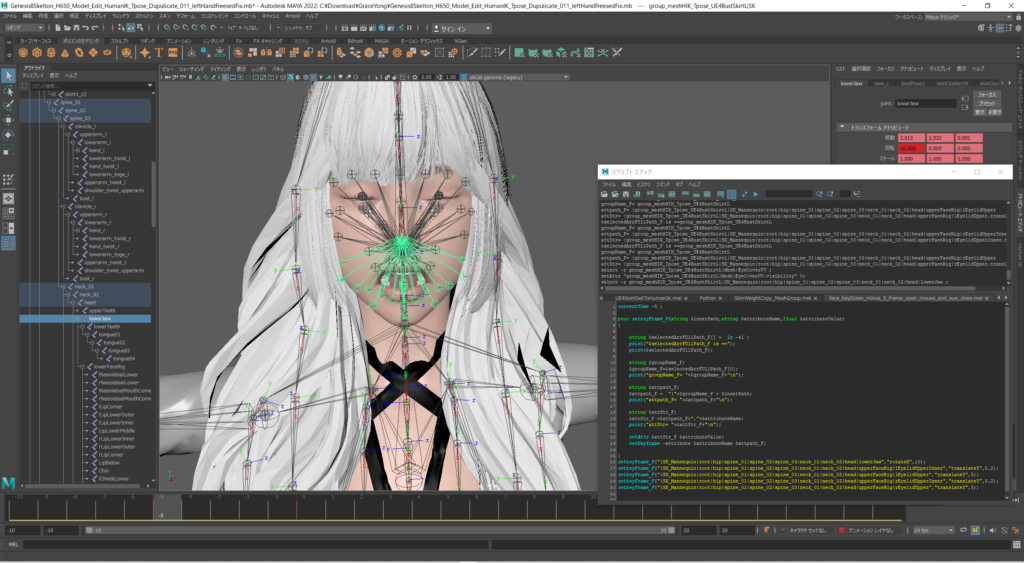
※1 MayaHumanIKにはない頭のジョイントをコピーして親子付けすると変なtransformができるが、全ジョイントのスケールをフリーズして、ヒストリ削除したら親子付けできる。
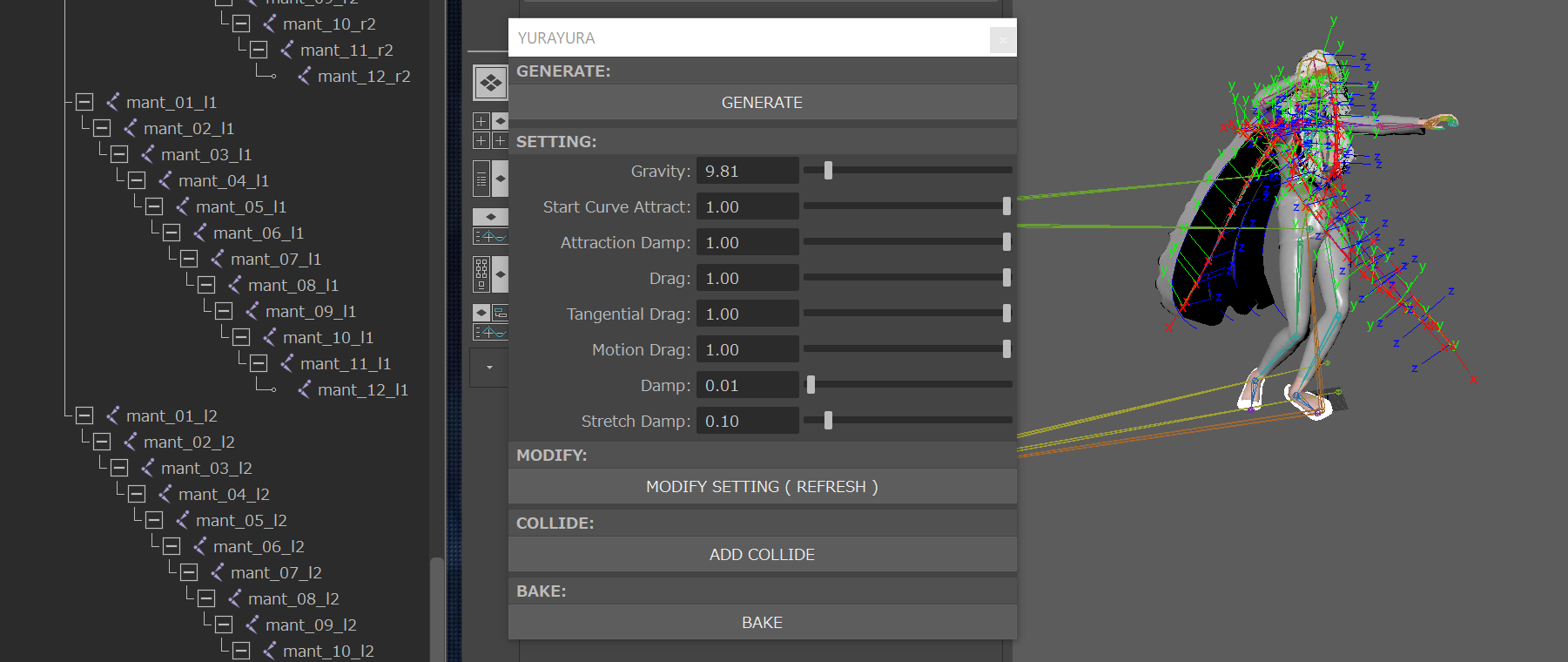
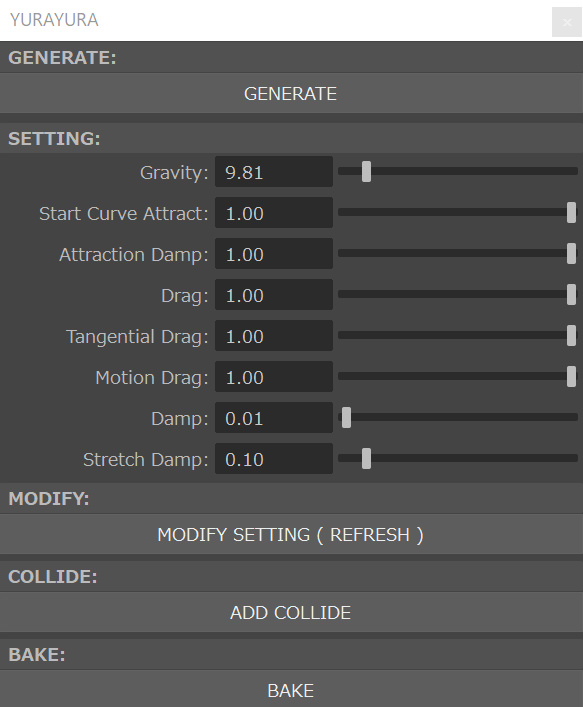
※2 HumanIKモーションの流し込みのビデオ
使用+橋渡しができたプラットフォームのデータ
UE4 FBX Export Options 設定は
全モーションのマージにはこれを作った (書き直したが疲れた。)
Maya起動後
C:\Users\whaison\Documents\maya\2016\ja_JP\scripts\python\MotionMerge\p030motionbuilder_chimera_0_Start
フレームのどこの部分に該当のモーションが入ってるかは下に出力した。
これをUE4読み込み時にUE4Pythonスクリプトで使う
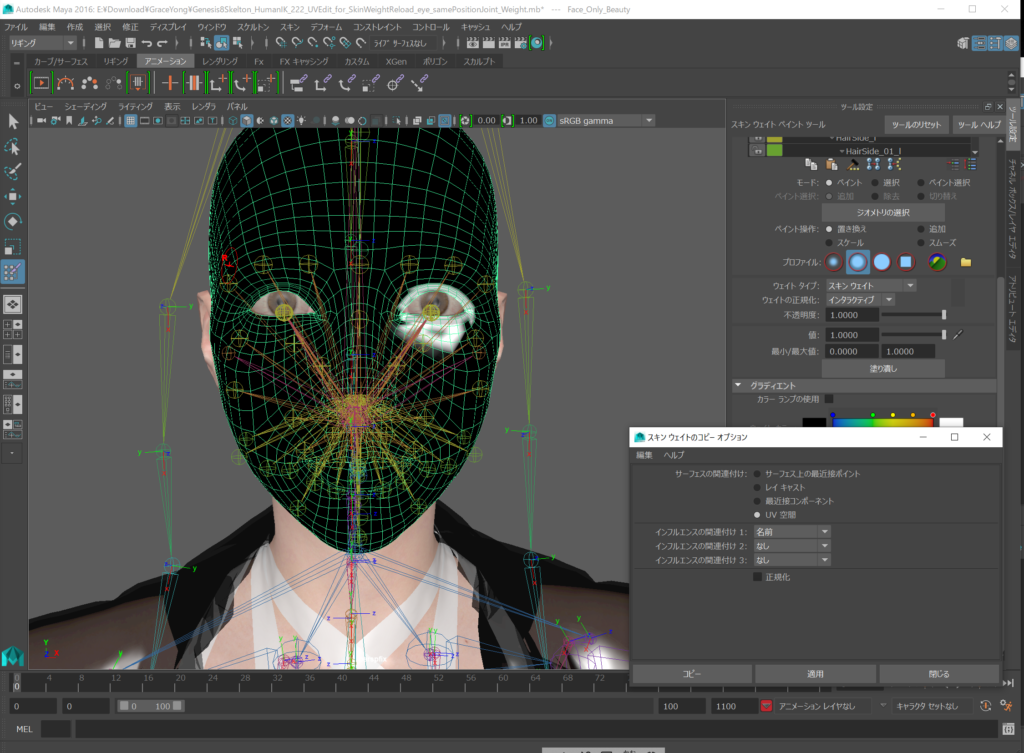
ほかの設定だと全くコピーされないか、完全におかしいコピーだった。
VIDEO
キーワード