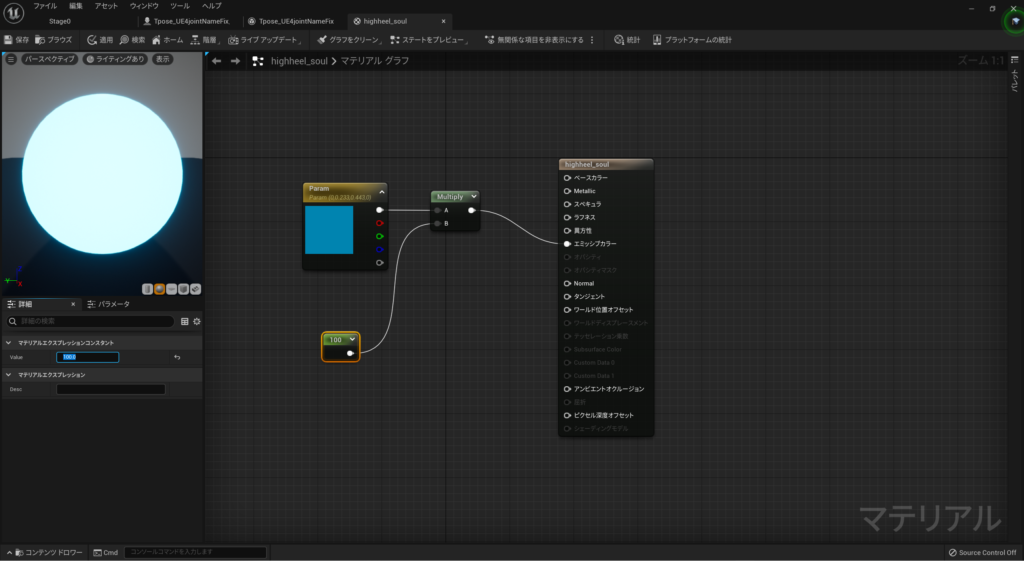
1000かけるとやっと発光する感じ
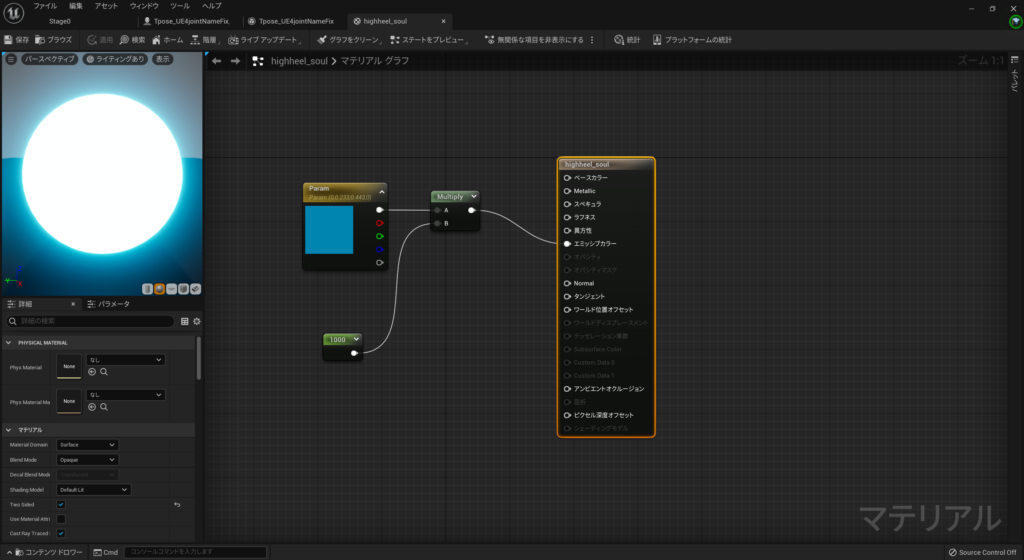
100とかだとこんぐらい あんまり発光感は薄い感じ
プロジェクトフォルダの
「Config」フォルダ内の
「DefaultEngine.ini」ファイルをメモ帳で
[SystemSettings]
r.TonemapperFilm=0
と追記しても旧トーンマッパが使えなかった。

DESIGN AND FUTURE SCIENCE.
1000かけるとやっと発光する感じ
100とかだとこんぐらい あんまり発光感は薄い感じ
プロジェクトフォルダの
「Config」フォルダ内の
「DefaultEngine.ini」ファイルをメモ帳で
[SystemSettings]
r.TonemapperFilm=0
と追記しても旧トーンマッパが使えなかった。
おかずさんのところで紹介していた方法がなんだかだめで
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET>"C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool\UnrealBuildTool.exe" -project="C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -game -rocket -progress -platforms=Win64-progress -2019 -platforms=Win64
ERROR: No platforms specified for targetERROR: No platforms specified for target と言われる
を参考に
これでビルドでけた。
cd C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool
UnrealBuildTool.exe AmbitionEarlyHourSky Win64 Development "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -rocket結果がこれ。
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>UnrealBuildTool.exe AmbitionEarlyHourSky Win64 Development "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -rocket
Win64 using Manual SDK 10.0.17763.0
Creating makefile for AmbitionEarlyHourSky (no existing makefile)
Parsing headers for AmbitionEarlyHourSky
Running UnrealHeaderTool "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\Intermediate\Build\Win64\AmbitionEarlyHourSky\Development\AmbitionEarlyHourSky.uhtmanifest" -LogCmds="loginit warning, logexit warning, logdatabase error" -Unattended -WarningsAsErrors -abslog="C:\Users\furcr\AppData\Local\UnrealBuildTool\Log_UHT.txt" -installed
Reflection code generated for AmbitionEarlyHourSky in 5.3679842 seconds
Building AmbitionEarlyHourSky...
Using Visual Studio 2019 14.28.29914 toolchain (C:\Program Files (x86)\Microsoft Visual Studio\2019\Community\VC\Tools\MSVC\14.28.29910) and Windows 10.0.17763.0 SDK (C:\Program Files (x86)\Windows Kits\10).
[Adaptive Build] Excluded from AmbitionEarlyHourSky unity file: MyBlueprintFunctionLibrary.cpp, SaveToText.cpp, TextFileToString.cpp, AmbitionEarlyHourSky.cpp, AmbitionEarlyHourSkyCharacter.cpp, AmbitionEarlyHourSkyGameMode.cpp
Building 19 actions with 16 processes...
[1/19] turbojpeg.dll
[2/19] Default.rc2
[3/19] SharedPCH.Engine.ShadowErrors.cpp
[4/19] AmbitionEarlyHourSky.cpp
[5/19] SaveToText.cpp
[6/19] MyBlueprintFunctionLibrary.cpp
[7/19] AmbitionEarlyHourSky.init.gen.cpp
[8/19] TextFileToString.gen.cpp
[9/19] MyBlueprintFunctionLibrary.gen.cpp
[10/19] AmbitionEarlyHourSkyGameMode.cpp
[11/19] SaveToText.gen.cpp
[12/19] AmbitionEarlyHourSkyCharacter.gen.cpp
[13/19] AmbitionEarlyHourSkyGameMode.gen.cpp
[14/19] AmbitionEarlyHourSkyCharacter.cpp
[15/19] Module.KawaiiPhysics.cpp
[16/19] Module.KawaiiPhysics.gen.cpp
[17/19] TextFileToString.cpp
[18/19] AmbitionEarlyHourSky.exe
ライブラリ C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\Binaries\Win64\AmbitionEarlyHourSky.lib とオブジェクト C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\Binaries\Win64\AmbitionEarlyHourSky.exp を作成中
[19/19] AmbitionEarlyHourSky.target
Total time in Parallel executor: 50.20 seconds
Total execution time: 60.73 seconds
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>UnrealBuildTool.exe AmbitionEarlyHourSky Win64 Development "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -rocket -rocket -progress
Win64 using Manual SDK 10.0.17763.0
@progress push 5%
@progress 'Generating code...' 0%
@progress 'Generating code...' 67%
@progress 'Generating code...' 100%
@progress pop
Target is up to date
Total execution time: 0.72 seconds
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>UnrealBuildTool.exe AmbitionEarlyHourSky Win64 Development "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -rocket -game -progress
Win64 using Manual SDK 10.0.17763.0
Creating makefile for AmbitionEarlyHourSky (command line arguments changed)
@progress push 5%
@progress 'Generating code...' 0%
@progress 'Generating code...' 67%
@progress 'Generating code...' 100%
@progress pop
Target is up to date
Total execution time: 1.16 seconds
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>UnrealBuildTool.exe AmbitionEarlyHourSky Win64 Development "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -rocket -game
Win64 using Manual SDK 10.0.17763.0
Target is up to date
Total execution time: 0.58 seconds
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>UnrealBuildTool.exe AmbitionEarlyHourSky Win64 Development "C:\Download\Game\DynamicParaglider_023_UE4_26_SkirtCharaCpp\AmbitionEarlyHourSky5.0\AmbitionEarlyHourSky.uproject" -rocket
Win64 using Manual SDK 10.0.17763.0
Creating makefile for AmbitionEarlyHourSky (command line arguments changed)
Target is up to date
Total execution time: 1.21 seconds
C:\Program Files\Epic Games\UE_5.0EA\Engine\Binaries\DotNET\UnrealBuildTool>slnはなんだかおかしいので
AmbitionEarlyHourSky.uproject をダブルクリックしてみた。

起動してる。。。

起動した!!
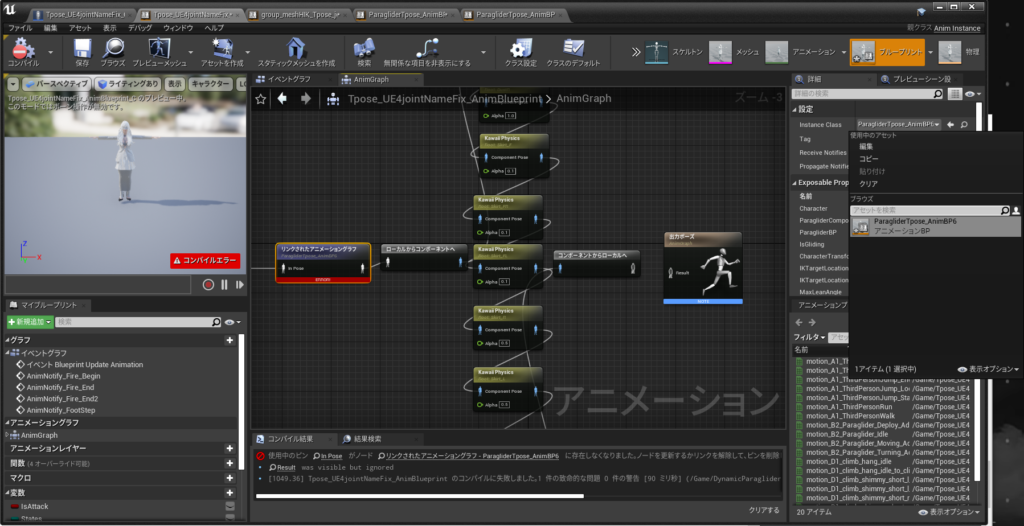
先に同じキャラクターのスケルトンでリンクするアニメーションブループリントABPを作っておくと選択肢にでてくる
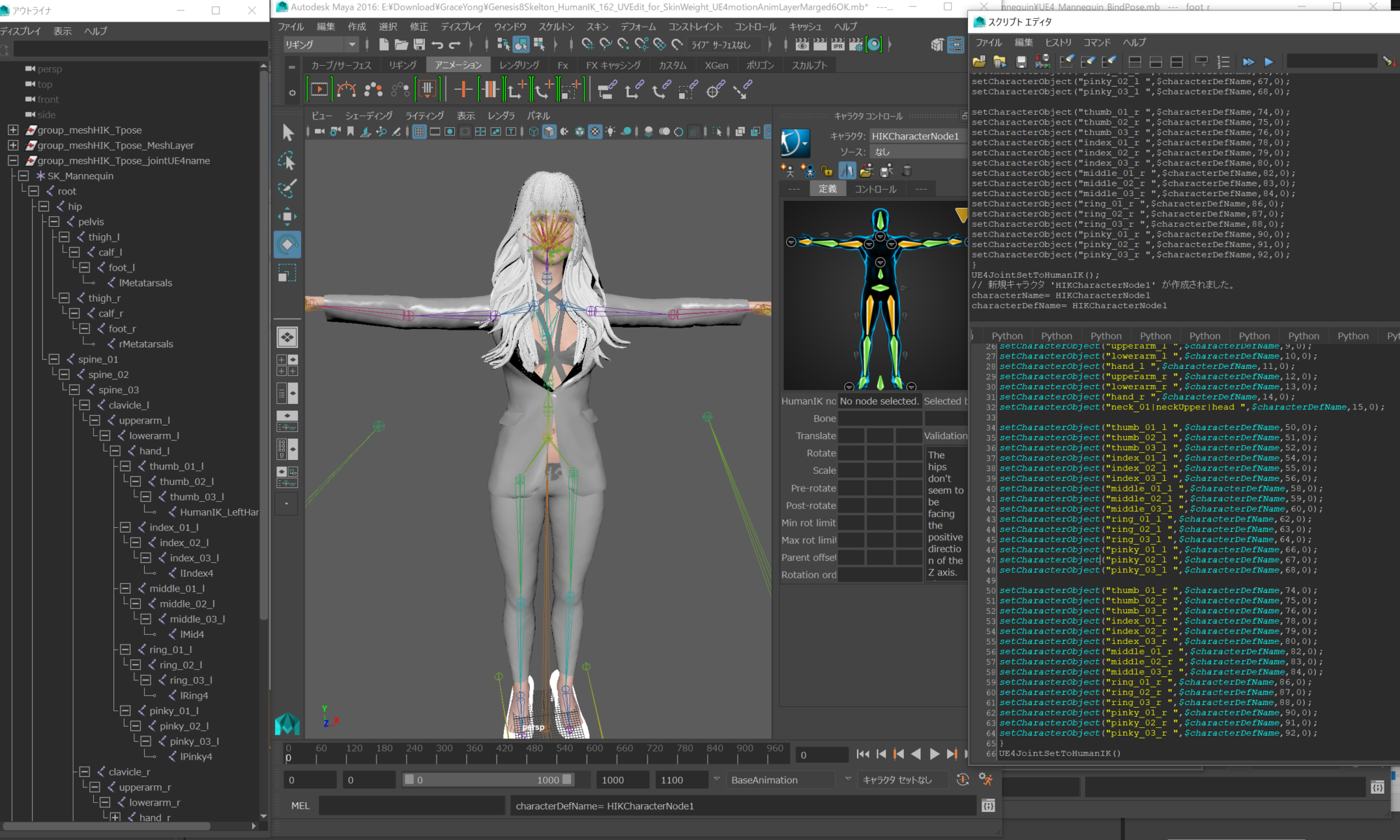
maya2016用
GroupNode
・Mesh
・SK_Mannequin/root
にしてから実行
Pythonで書き直した。2021年12月DragonNightにWaterモーション追加時に追記
Daz StudioのジョイントをHumanIKに追加用
# -*- coding: utf-8 -*-
from maya import cmds
import maya.mel as mel
import re
import pymel.core as pm
def makeHumanIkDef_from_selected_groupName():
selectedGlp=""
characterName=""
selectedArr=cmds.ls(sl=1)
print("selectedArr= "+str(selectedArr))
if(str(selectedArr)=="[]"):
print("You Should Select root Group Node!!!")
else:
selectedGlp=selectedArr[0]
characterName=pm.mel.hikCreateCharacter(selectedGlp)
#evalStr='$characterName = `hikCreateCharacter('+selectedGlp+')`'
#myPythonVar=mel.eval('$tempMelVar=$gMainWindow')
#characterName=mel.eval(evalStr)
print(u"characterName= " + str(characterName))
return characterName,selectedGlp
def LongNameToShortName(LongName):
#childfullpath= |group_meshHIK_Tpose_jointUE4name5|SK_Mannequin|root|hip|spine_01
LongNameArr=LongName.split("|")
LongNameArrLong=len(LongNameArr)
shortName=LongNameArr[LongNameArrLong-1]
return shortName
def Group_in_joint(GroupName,jointName):
print("jointName= "+jointName)
HitJointFullPath=""
groupChild=cmds.ls(GroupName,dag=1,long=1)
for childfullpath in groupChild:
searchStr=r'.*'+'\|'+jointName+r'$'
print("searchStr= "+searchStr +" childfullpath= "+childfullpath)
MatchObj=re.match(searchStr, childfullpath)
MatchBool=bool(MatchObj)
if(MatchBool==True):
HitJointFullPath=childfullpath
print("HitJointFullPath !!!!!!!!= "+HitJointFullPath)
break
#shortjointNameArr=cmds.ls(childfullpath,shortNames=1)
#shortjointName=shortjointNameArr[0]
shortjointName=LongNameToShortName(childfullpath)
print("searchStr= "+jointName +" shortjointName= "+shortjointName)
if(str(shortjointName)==str(jointName)):
HitJointFullPath=childfullpath
print("HitJointFullPath !!!!!!!!= "+shortjointName)
break
print("HitJointFullPath= "+HitJointFullPath)
return HitJointFullPath
def setCharacterObject(GroupName,jointName,characterDefName,RigInt,RigInt2):
#MEL setCharacterObject("root",$characterDefName,0,0);
jointFullName=Group_in_joint(GroupName,jointName)
evalStr='setCharacterObject("'+jointFullName+'","'+characterDefName+'",'+str(RigInt)+','+str(RigInt2)+');'
print("evalStr= "+ evalStr)
mel.eval(evalStr)
def UE4JointSetToHumanIK():
characterDefName,GroupName= makeHumanIkDef_from_selected_groupName()
#print("characterDefName= "+characterDefName)
setCharacterObject(GroupName,"root",characterDefName,0,0);
setCharacterObject(GroupName,"hip",characterDefName,1,0);
setCharacterObject(GroupName,"thigh_l",characterDefName,2,0);
setCharacterObject(GroupName,"calf_l",characterDefName,3,0);
setCharacterObject(GroupName,"foot_l",characterDefName,4,0);
setCharacterObject(GroupName,"thigh_r",characterDefName,5,0);
setCharacterObject(GroupName,"calf_r",characterDefName,6,0);
setCharacterObject(GroupName,"foot_r",characterDefName,7,0);
setCharacterObject(GroupName,"spine_01",characterDefName,8,0);
setCharacterObject(GroupName,"upperarm_l",characterDefName,9,0);
setCharacterObject(GroupName,"lowerarm_l",characterDefName,10,0);
setCharacterObject(GroupName,"hand_l",characterDefName,11,0);
setCharacterObject(GroupName,"upperarm_r",characterDefName,12,0);
setCharacterObject(GroupName,"lowerarm_r",characterDefName,13,0);
setCharacterObject(GroupName,"hand_r",characterDefName,14,0);
setCharacterObject(GroupName,"head",characterDefName,15,0);
setCharacterObject(GroupName,"thumb_02_l",characterDefName,50,0);
setCharacterObject(GroupName,"thumb_03_l",characterDefName,51,0);
setCharacterObject(GroupName,"thumb_04_l",characterDefName,52,0);
setCharacterObject(GroupName,"index_01_l",characterDefName,54,0);
setCharacterObject(GroupName,"index_02_l",characterDefName,55,0);
setCharacterObject(GroupName,"index_03_l",characterDefName,56,0);
setCharacterObject(GroupName,"middle_01_l",characterDefName,58,0);
setCharacterObject(GroupName,"middle_02_l",characterDefName,59,0);
setCharacterObject(GroupName,"middle_03_l",characterDefName,60,0);
setCharacterObject(GroupName,"ring_01_l",characterDefName,62,0);
setCharacterObject(GroupName,"ring_02_l",characterDefName,63,0);
setCharacterObject(GroupName,"ring_03_l",characterDefName,64,0);
setCharacterObject(GroupName,"pinky_01_l",characterDefName,66,0);
setCharacterObject(GroupName,"pinky_02_l",characterDefName,67,0);
setCharacterObject(GroupName,"pinky_03_l",characterDefName,68,0);
setCharacterObject(GroupName,"thumb_02_r",characterDefName,74,0);
setCharacterObject(GroupName,"thumb_03_r",characterDefName,75,0);
setCharacterObject(GroupName,"thumb_04_r",characterDefName,76,0);
setCharacterObject(GroupName,"index_01_r",characterDefName,78,0);
setCharacterObject(GroupName,"index_02_r",characterDefName,79,0);
setCharacterObject(GroupName,"index_03_r",characterDefName,80,0);
setCharacterObject(GroupName,"middle_01_r",characterDefName,82,0);
setCharacterObject(GroupName,"middle_02_r",characterDefName,83,0);
setCharacterObject(GroupName,"middle_03_r",characterDefName,84,0);
setCharacterObject(GroupName,"ring_01_r",characterDefName,86,0);
setCharacterObject(GroupName,"ring_02_r",characterDefName,87,0);
setCharacterObject(GroupName,"ring_03_r",characterDefName,88,0);
setCharacterObject(GroupName,"pinky_01_r",characterDefName,90,0);
setCharacterObject(GroupName,"pinky_02_r",characterDefName,91,0);
setCharacterObject(GroupName,"pinky_03_r",characterDefName,92,0);
UE4JointSetToHumanIK()MEL(UE4グレイマンジョイントをリファレンスしてる場合) Ver.3
//selected_gloup_nodeName_to_HumanIKCharacterName UE4 joint Refferenced. Ver3
//you shuld Select Root Joint
global proc string makeHumanIkDef_from_selected_groupName()
{
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
$characterName = `hikCreateCharacter($selectedGlp)`;
print("characterName= "+$characterName+"\n");
return $characterName;
};
global proc string Get_RefferenceName_selected_groupName()
{
string $RefferenceName ="";
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
string $buffer[];
$numTokens = `tokenize $selectedGlp ":" $buffer`;
//print("$buffer= "+$buffer+"\n");
$RefferenceName=$buffer[0];
print("$RefferenceName= "+$RefferenceName+"\n");
return $RefferenceName;
};
global proc UE4JointSetToHumanIK()
{
string $selectedArr[] = `ls -sl`;
print($selectedArr);
if($selectedArr[0]==""){
print("You Should Select joint And Mesh Group!!!!!!!");
}else{
$RefferenceName= `Get_RefferenceName_selected_groupName`;
print("$RefferenceName= "+$RefferenceName+"\n");
$characterDefName= `makeHumanIkDef_from_selected_groupName`;
print("characterDefName= "+$characterDefName+"\n");
//setCharacterObject to UnrealEngine4 (UE4)Joint
setCharacterObject($RefferenceName+":root",$characterDefName,0,0);
setCharacterObject($RefferenceName+":pelvis",$characterDefName,1,0);
setCharacterObject($RefferenceName+":thigh_l",$characterDefName,2,0);
setCharacterObject($RefferenceName+":calf_l",$characterDefName,3,0);
setCharacterObject($RefferenceName+":foot_l",$characterDefName,4,0);
setCharacterObject($RefferenceName+":thigh_r",$characterDefName,5,0);
setCharacterObject($RefferenceName+":calf_r",$characterDefName,6,0);
setCharacterObject($RefferenceName+":foot_r",$characterDefName,7,0);
setCharacterObject($RefferenceName+":spine_01 ",$characterDefName,8,0);
setCharacterObject($RefferenceName+":upperarm_l ",$characterDefName,9,0);
setCharacterObject($RefferenceName+":lowerarm_l ",$characterDefName,10,0);
setCharacterObject($RefferenceName+":hand_l ",$characterDefName,11,0);
setCharacterObject($RefferenceName+":upperarm_r ",$characterDefName,12,0);
setCharacterObject($RefferenceName+":lowerarm_r ",$characterDefName,13,0);
setCharacterObject($RefferenceName+":hand_r ",$characterDefName,14,0);
setCharacterObject($RefferenceName+":head ",$characterDefName,15,0);
setCharacterObject($RefferenceName+":thumb_01_l ",$characterDefName,50,0);
setCharacterObject($RefferenceName+":thumb_02_l ",$characterDefName,51,0);
setCharacterObject($RefferenceName+":thumb_03_l ",$characterDefName,52,0);
setCharacterObject($RefferenceName+":index_01_l ",$characterDefName,54,0);
setCharacterObject($RefferenceName+":index_02_l ",$characterDefName,55,0);
setCharacterObject($RefferenceName+":index_03_l ",$characterDefName,56,0);
setCharacterObject($RefferenceName+":middle_01_l ",$characterDefName,58,0);
setCharacterObject($RefferenceName+":middle_02_l ",$characterDefName,59,0);
setCharacterObject($RefferenceName+":middle_03_l ",$characterDefName,60,0);
setCharacterObject($RefferenceName+":ring_01_l ",$characterDefName,62,0);
setCharacterObject($RefferenceName+":ring_02_l ",$characterDefName,63,0);
setCharacterObject($RefferenceName+":ring_03_l ",$characterDefName,64,0);
setCharacterObject($RefferenceName+":pinky_01_l ",$characterDefName,66,0);
setCharacterObject($RefferenceName+":pinky_02_l ",$characterDefName,67,0);
setCharacterObject($RefferenceName+":pinky_03_l ",$characterDefName,68,0);
setCharacterObject($RefferenceName+":thumb_01_r ",$characterDefName,74,0);
setCharacterObject($RefferenceName+":thumb_02_r ",$characterDefName,75,0);
setCharacterObject($RefferenceName+":thumb_03_r ",$characterDefName,76,0);
setCharacterObject($RefferenceName+":index_01_r ",$characterDefName,78,0);
setCharacterObject($RefferenceName+":index_02_r ",$characterDefName,79,0);
setCharacterObject($RefferenceName+":index_03_r ",$characterDefName,80,0);
setCharacterObject($RefferenceName+":middle_01_r ",$characterDefName,82,0);
setCharacterObject($RefferenceName+":middle_02_r ",$characterDefName,83,0);
setCharacterObject($RefferenceName+":middle_03_r ",$characterDefName,84,0);
setCharacterObject($RefferenceName+":ring_01_r ",$characterDefName,86,0);
setCharacterObject($RefferenceName+":ring_02_r ",$characterDefName,87,0);
setCharacterObject($RefferenceName+":ring_03_r ",$characterDefName,88,0);
setCharacterObject($RefferenceName+":pinky_01_r ",$characterDefName,90,0);
setCharacterObject($RefferenceName+":pinky_02_r ",$characterDefName,91,0);
setCharacterObject($RefferenceName+":pinky_03_r ",$characterDefName,92,0);
}
};
UE4JointSetToHumanIK()
MEL(UE4ジョイントがシーンに2つある場合用) hipがないタイプ用
//selected_group_nodeName_to_HumanIKCharacterName
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
global proc string makeHumanIkDef_from_selected_groupName()
{
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
$characterName = `hikCreateCharacter($selectedGlp)`;
print("characterName= "+$characterName+"\n");
return $characterName;
};
global proc UE4_pelvis_JointSetToHumanIK_FullPath(string $selectedGlp)
{
$characterDefName= `makeHumanIkDef_from_selected_groupName`;
print("characterDefName= "+$characterDefName+"\n");
//setCharacterObject to UnrealEngine4 (UE4)Joint
setCharacterObject($selectedGlp+"|SK_Mannequin|root",$characterDefName,0,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis",$characterDefName,1,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|thigh_l",$characterDefName,2,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|thigh_l|calf_l",$characterDefName,3,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|thigh_l|calf_l|foot_l",$characterDefName,4,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|thigh_r",$characterDefName,5,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|thigh_r|calf_r",$characterDefName,6,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|thigh_r|calf_r|foot_r",$characterDefName,7,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01 ",$characterDefName,8,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l",$characterDefName,9,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l",$characterDefName,10,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l",$characterDefName,11,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r",$characterDefName,12,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r",$characterDefName,13,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r",$characterDefName,14,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|neck_01|head",$characterDefName,15,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|thumb_01_l",$characterDefName,50,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|thumb_01_l|thumb_02_l",$characterDefName,51,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|thumb_01_l|thumb_02_l|thumb_03_l",$characterDefName,52,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|index_01_l",$characterDefName,54,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|index_01_l|index_02_l",$characterDefName,55,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|index_01_l|index_02_l|index_03_l",$characterDefName,56,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|middle_01_l",$characterDefName,58,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|middle_01_l|middle_02_l",$characterDefName,59,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|middle_01_l|middle_02_l|middle_03_l",$characterDefName,60,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|ring_01_l",$characterDefName,62,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|ring_01_l|ring_02_l",$characterDefName,63,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|ring_01_l|ring_02_l|ring_03_l",$characterDefName,64,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|pinky_01_l",$characterDefName,66,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|pinky_01_l|pinky_02_l",$characterDefName,67,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|pinky_01_l|pinky_02_l|pinky_03_l",$characterDefName,68,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|thumb_01_r",$characterDefName,74,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|thumb_01_r|thumb_02_r",$characterDefName,75,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|thumb_01_r|thumb_02_r|thumb_03_r",$characterDefName,76,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|index_01_r",$characterDefName,78,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|index_01_r|index_02_r",$characterDefName,79,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|index_01_r|index_02_r|index_03_r",$characterDefName,80,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|middle_01_r",$characterDefName,82,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|middle_01_r|middle_02_r",$characterDefName,83,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|middle_01_r|middle_02_r|middle_03_r",$characterDefName,84,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|ring_01_r",$characterDefName,86,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|ring_01_r|ring_02_r",$characterDefName,87,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|ring_01_r|ring_02_r|ring_03_r",$characterDefName,88,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|pinky_01_r",$characterDefName,90,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|pinky_01_r|pinky_02_r",$characterDefName,91,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|pelvis|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|pinky_01_r|pinky_02_r|pinky_03_r",$characterDefName,92,0);
}
UE4_pelvis_JointSetToHumanIK_FullPath($selectedGlp)MEL (UE4ジョイントがシーンに2つある場合用) hipがあるタイプ用
//selected_gloup_nodeName_to_HumanIKCharacterName
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
global proc string makeHumanIkDef_from_selected_groupName()
{
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
$characterName = `hikCreateCharacter($selectedGlp)`;
print("characterName= "+$characterName+"\n");
return $characterName;
};
global proc UE4JointSetToHumanIK_FullPath(string $selectedGlp)
{
$characterDefName= `makeHumanIkDef_from_selected_groupName`;
print("characterDefName= "+$characterDefName+"\n");
//setCharacterObject to UnrealEngine4 (UE4)Joint
setCharacterObject($selectedGlp+"|SK_Mannequin|root",$characterDefName,0,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip",$characterDefName,1,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|pelvis|thigh_l",$characterDefName,2,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|pelvis|thigh_l|calf_l",$characterDefName,3,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|pelvis|thigh_l|calf_l|foot_l",$characterDefName,4,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|pelvis|thigh_r",$characterDefName,5,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|pelvis|thigh_r|calf_r",$characterDefName,6,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|pelvis|thigh_r|calf_r|foot_r",$characterDefName,7,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01 ",$characterDefName,8,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l",$characterDefName,9,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l",$characterDefName,10,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l",$characterDefName,11,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r",$characterDefName,12,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r",$characterDefName,13,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r",$characterDefName,14,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|neck_01|neckUpper|head",$characterDefName,15,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|thumb_01_l",$characterDefName,50,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|thumb_01_l|thumb_02_l",$characterDefName,51,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|thumb_01_l|thumb_02_l|thumb_03_l",$characterDefName,52,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|index_01_l",$characterDefName,54,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|index_01_l|index_02_l",$characterDefName,55,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|index_01_l|index_02_l|index_03_l",$characterDefName,56,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|middle_01_l",$characterDefName,58,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|middle_01_l|middle_02_l",$characterDefName,59,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|middle_01_l|middle_02_l|middle_03_l",$characterDefName,60,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|ring_01_l",$characterDefName,62,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|ring_01_l|ring_02_l",$characterDefName,63,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|ring_01_l|ring_02_l|ring_03_l",$characterDefName,64,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|pinky_01_l",$characterDefName,66,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|pinky_01_l|pinky_02_l",$characterDefName,67,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_l|upperarm_l|lowerarm_l|hand_l|pinky_01_l|pinky_02_l|pinky_03_l",$characterDefName,68,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|thumb_01_r",$characterDefName,74,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|thumb_01_r|thumb_02_r",$characterDefName,75,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|thumb_01_r|thumb_02_r|thumb_03_r",$characterDefName,76,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|index_01_r",$characterDefName,78,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|index_01_r|index_02_r",$characterDefName,79,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|index_01_r|index_02_r|index_03_r",$characterDefName,80,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|middle_01_r",$characterDefName,82,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|middle_01_r|middle_02_r",$characterDefName,83,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|middle_01_r|middle_02_r|middle_03_r",$characterDefName,84,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|ring_01_r",$characterDefName,86,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|ring_01_r|ring_02_r",$characterDefName,87,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|ring_01_r|ring_02_r|ring_03_r",$characterDefName,88,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|pinky_01_r",$characterDefName,90,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|pinky_01_r|pinky_02_r",$characterDefName,91,0);
setCharacterObject($selectedGlp+"|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|clavicle_r|upperarm_r|lowerarm_r|hand_r|pinky_01_r|pinky_02_r|pinky_03_r",$characterDefName,92,0);
}
UE4JointSetToHumanIK_FullPath($selectedGlp)MEL (UE4 ジョイントはシーンに1つ用)
//selected_gloup_nodeName_to_HumanIKCharacterName
global proc string makeHumanIkDef_from_selected_groupName()
{
string $selectedArr[] = `ls -sl`;
print($selectedArr);
string $selectedGlp = $selectedArr[0];
$characterName = `hikCreateCharacter($selectedGlp)`;
print("characterName= "+$characterName+"\n");
return $characterName;
};
global proc UE4JointSetToHumanIK()
{
$characterDefName= `makeHumanIkDef_from_selected_groupName`;
print("characterDefName= "+$characterDefName+"\n");
//setCharacterObject to UnrealEngine4 (UE4)Joint
setCharacterObject("root",$characterDefName,0,0);
setCharacterObject("root|hip",$characterDefName,1,0);
setCharacterObject("thigh_l",$characterDefName,2,0);
setCharacterObject("calf_l",$characterDefName,3,0);
setCharacterObject("foot_l",$characterDefName,4,0);
setCharacterObject("thigh_r",$characterDefName,5,0);
setCharacterObject("calf_r",$characterDefName,6,0);
setCharacterObject("foot_r",$characterDefName,7,0);
setCharacterObject("spine_01 ",$characterDefName,8,0);
setCharacterObject("upperarm_l ",$characterDefName,9,0);
setCharacterObject("lowerarm_l ",$characterDefName,10,0);
setCharacterObject("hand_l ",$characterDefName,11,0);
setCharacterObject("upperarm_r ",$characterDefName,12,0);
setCharacterObject("lowerarm_r ",$characterDefName,13,0);
setCharacterObject("hand_r ",$characterDefName,14,0);
setCharacterObject("neck_01|neckUpper|head ",$characterDefName,15,0);
setCharacterObject("thumb_01_l ",$characterDefName,50,0);
setCharacterObject("thumb_02_l ",$characterDefName,51,0);
setCharacterObject("thumb_03_l ",$characterDefName,52,0);
setCharacterObject("index_01_l ",$characterDefName,54,0);
setCharacterObject("index_02_l ",$characterDefName,55,0);
setCharacterObject("index_03_l ",$characterDefName,56,0);
setCharacterObject("middle_01_l ",$characterDefName,58,0);
setCharacterObject("middle_02_l ",$characterDefName,59,0);
setCharacterObject("middle_03_l ",$characterDefName,60,0);
setCharacterObject("ring_01_l ",$characterDefName,62,0);
setCharacterObject("ring_02_l ",$characterDefName,63,0);
setCharacterObject("ring_03_l ",$characterDefName,64,0);
setCharacterObject("pinky_01_l ",$characterDefName,66,0);
setCharacterObject("pinky_02_l ",$characterDefName,67,0);
setCharacterObject("pinky_03_l ",$characterDefName,68,0);
setCharacterObject("thumb_01_r ",$characterDefName,74,0);
setCharacterObject("thumb_02_r ",$characterDefName,75,0);
setCharacterObject("thumb_03_r ",$characterDefName,76,0);
setCharacterObject("index_01_r ",$characterDefName,78,0);
setCharacterObject("index_02_r ",$characterDefName,79,0);
setCharacterObject("index_03_r ",$characterDefName,80,0);
setCharacterObject("middle_01_r ",$characterDefName,82,0);
setCharacterObject("middle_02_r ",$characterDefName,83,0);
setCharacterObject("middle_03_r ",$characterDefName,84,0);
setCharacterObject("ring_01_r ",$characterDefName,86,0);
setCharacterObject("ring_02_r ",$characterDefName,87,0);
setCharacterObject("ring_03_r ",$characterDefName,88,0);
setCharacterObject("pinky_01_r ",$characterDefName,90,0);
setCharacterObject("pinky_02_r ",$characterDefName,91,0);
setCharacterObject("pinky_03_r ",$characterDefName,92,0);
}
UE4JointSetToHumanIK()Python のsetCharacterObjectはないみたい。mel.evalで呼ぶこともできるかなあ。
ちょっとめんどいのでまた今度。
UE4ジョイントが二つあった場合にうまく動かないのでフルパスに更新予定
//以下調べもの用
HumanIKをコマンドで操作する
https://qiita.com/amanatsu-knit/items/8c66297b012d74f7438a
whatIs hikCreateCharacter;
whatIs setCharacterObject;
C:/Program Files/Autodesk/Maya2016/scripts/others/hikGlobalUtils.mel
[MEL] 戻り値を配列で返す
なぜかずっと出来ないと思っていた、
プロシージャの戻り値を配列で返す方法。
以下サンプル。
proc string[] sample(string $param[])
{
string $return[];
for ($i = 0 ; $i < size($param) ; $i++)
{
$return[$i] = “Re_”+$param[$i];
}
return $return;
}
sample({“aaa”,”bbb”,”ccc”});
// Result: Re_aaa Re_bbb Re_ccc //
//HumanIKのコントローラー番号
for($i = 0; $i < 212; $i++)
{
$HIKname = GetHIKNodeName($i);
print ($i + ” :” + $HIKname + “\n”);
};
0 :Reference
1 :Hips
2 :LeftUpLeg
3 :LeftLeg
4 :LeftFoot
5 :RightUpLeg
6 :RightLeg
7 :RightFoot
8 :Spine
9 :LeftArm
10 :LeftForeArm
11 :LeftHand
12 :RightArm
13 :RightForeArm
14 :RightHand
15 :Head
16 :LeftToeBase
17 :RightToeBase
18 :LeftShoulder
19 :RightShoulder
20 :Neck
21 :LeftFingerBase
22 :RightFingerBase
23 :Spine1
24 :Spine2
25 :Spine3
26 :Spine4
27 :Spine5
28 :Spine6
29 :Spine7
30 :Spine8
31 :Spine9
32 :Neck1
33 :Neck2
34 :Neck3
35 :Neck4
36 :Neck5
37 :Neck6
38 :Neck7
39 :Neck8
40 :Neck9
41 :LeftUpLegRoll
42 :LeftLegRoll
43 :RightUpLegRoll
44 :RightLegRoll
45 :LeftArmRoll
46 :LeftForeArmRoll
47 :RightArmRoll
48 :RightForeArmRoll
49 :HipsTranslation
50 :LeftHandThumb1
51 :LeftHandThumb2
52 :LeftHandThumb3
53 :LeftHandThumb4
54 :LeftHandIndex1
55 :LeftHandIndex2
56 :LeftHandIndex3
57 :LeftHandIndex4
58 :LeftHandMiddle1
59 :LeftHandMiddle2
60 :LeftHandMiddle3
61 :LeftHandMiddle4
62 :LeftHandRing1
63 :LeftHandRing2
64 :LeftHandRing3
65 :LeftHandRing4
66 :LeftHandPinky1
67 :LeftHandPinky2
68 :LeftHandPinky3
69 :LeftHandPinky4
70 :LeftHandExtraFinger1
71 :LeftHandExtraFinger2
72 :LeftHandExtraFinger3
73 :LeftHandExtraFinger4
74 :RightHandThumb1
75 :RightHandThumb2
76 :RightHandThumb3
77 :RightHandThumb4
78 :RightHandIndex1
79 :RightHandIndex2
80 :RightHandIndex3
81 :RightHandIndex4
82 :RightHandMiddle1
83 :RightHandMiddle2
84 :RightHandMiddle3
85 :RightHandMiddle4
86 :RightHandRing1
87 :RightHandRing2
88 :RightHandRing3
89 :RightHandRing4
90 :RightHandPinky1
91 :RightHandPinky2
92 :RightHandPinky3
93 :RightHandPinky4
94 :RightHandExtraFinger1
95 :RightHandExtraFinger2
96 :RightHandExtraFinger3
97 :RightHandExtraFinger4
98 :LeftFootThumb1
99 :LeftFootThumb2
100 :LeftFootThumb3
101 :LeftFootThumb4
102 :LeftFootIndex1
103 :LeftFootIndex2
104 :LeftFootIndex3
105 :LeftFootIndex4
106 :LeftFootMiddle1
107 :LeftFootMiddle2
108 :LeftFootMiddle3
109 :LeftFootMiddle4
110 :LeftFootRing1
111 :LeftFootRing2
112 :LeftFootRing3
113 :LeftFootRing4
114 :LeftFootPinky1
115 :LeftFootPinky2
116 :LeftFootPinky3
117 :LeftFootPinky4
118 :LeftFootExtraFinger1
119 :LeftFootExtraFinger2
120 :LeftFootExtraFinger3
121 :LeftFootExtraFinger4
122 :RightFootThumb1
123 :RightFootThumb2
124 :RightFootThumb3
125 :RightFootThumb4
126 :RightFootIndex1
127 :RightFootIndex2
128 :RightFootIndex3
129 :RightFootIndex4
130 :RightFootMiddle1
131 :RightFootMiddle2
132 :RightFootMiddle3
133 :RightFootMiddle4
134 :RightFootRing1
135 :RightFootRing2
136 :RightFootRing3
137 :RightFootRing4
138 :RightFootPinky1
139 :RightFootPinky2
140 :RightFootPinky3
141 :RightFootPinky4
142 :RightFootExtraFinger1
143 :RightFootExtraFinger2
144 :RightFootExtraFinger3
145 :RightFootExtraFinger4
146 :LeftInHandThumb
147 :LeftInHandIndex
148 :LeftInHandMiddle
149 :LeftInHandRing
150 :LeftInHandPinky
151 :LeftInHandExtraFinger
152 :RightInHandThumb
153 :RightInHandIndex
154 :RightInHandMiddle
155 :RightInHandRing
156 :RightInHandPinky
157 :RightInHandExtraFinger
158 :LeftInFootThumb
159 :LeftInFootIndex
160 :LeftInFootMiddle
161 :LeftInFootRing
162 :LeftInFootPinky
163 :LeftInFootExtraFinger
164 :RightInFootThumb
165 :RightInFootIndex
166 :RightInFootMiddle
167 :RightInFootRing
168 :RightInFootPinky
169 :RightInFootExtraFinger
170 :LeftShoulderExtra
171 :RightShoulderExtra
172 :
173 :
174 :
175 :
176 :

以下のサイトを参考にさせていただきました。
https://horizonglow2.blogspot.com/2019/02/ue4.html
新規C++クラスを作成します。
作成するのは、成果物がBPで扱えるBlueprint Function Libraryになります。
フォルダやクラス名を適当に決めたら、VisualStudioが開きます。
まず.hファイルに定義を書きます。
ここではTextFileToStringというクラスを作成することにします。
書いたコードはこんな感じ。
// Fill out your copyright notice in the Description page of Project Settings.
#pragma once
#include "CoreMinimal.h"
#include "Kismet/BlueprintFunctionLibrary.h"
#include "TextFileToString.generated.h"
/**
*
*/
UCLASS()
class AMBITIONEARLYHOURSKY_API UTextFileToString : public UBlueprintFunctionLibrary
{
GENERATED_BODY()
UFUNCTION(BlueprintCallable, Category = "MyBPLibrary")
static void TextFileLoadToString(FString Filename, FString& FileData, bool& Success);
};
CPPはこう
// Fill out your copyright notice in the Description page of Project Settings.
#include "TextFileToString.h"
// ScriptLoader.cpp
//#include "FileHelpers.h"
#include "Engine.h"
// ScriptLoader.cpp
void UTextFileToString::TextFileLoadToString(FString Filename, FString& FileData, bool& Success)
{
if (GEngine)
{
FString FilePath = Filename;
if (!FPlatformFileManager::Get().GetPlatformFile().FileExists(*FilePath))
{
Success = false;
return;
}
const int64 FileSize = FPlatformFileManager::Get().GetPlatformFile().FileSize(*FilePath);
FFileHelper::LoadFileToString(FileData, *FilePath);
Success = true;
}
Success = false;
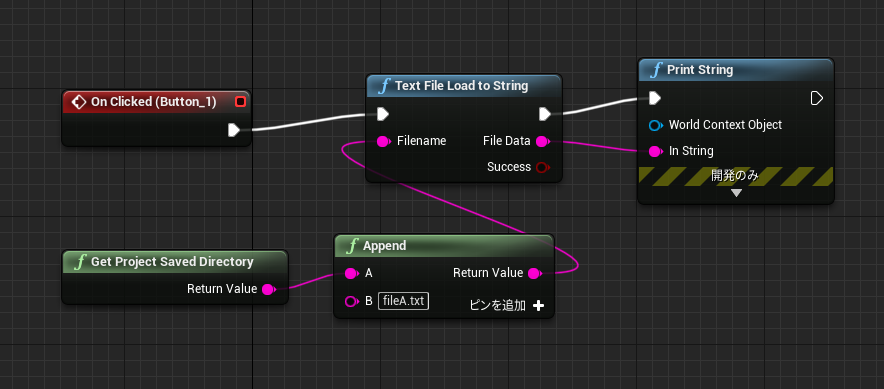
}こんなノードの使い方します。
以下を参考にさせてもらいました。
https://htsuda.net/archives/1815
プロジェクトファイル(拡張子が .uproject となっているファイル)があるフォルダの中に Source という名前のフォルダをまず作成します。次にC++ プロジェクトを作成します。プロジェクトファイルを右クリックすると、メニューの中に Generate Visual Studio project files というのがあるのでそれをクリックします。
レベルエディタのメニューから「ファイル File」> 「新規C++クラス New C++ Class」を選びます。親クラスは Actor にします。ファイル名は SaveToText とします。公開設定はパブリックを選んでおきます。クラス作成ボタンを押すとしばらくのコンパイル時間の後にヘッダファイルと cpp ファイルが作成され、VS が開きます。
C++ のエディタが開いていない場合はコンテンツブラウザの C++ クラス(C++ Classes)フォルダ内にある SaveToText のファイルをダブルクリックします。そして、SaveToText.hと SaveToText.cpp を下記のように書き換えます。
クラス名の自動生成されている部分class ゲーム名_APIは書き換えずにおきます。
class AMBITIONEARLYHOURSKY_API USaveToText : public UBlueprintFunctionLibrary
あとは
public: の行以下の部分を追加するだけでOKです。
// Fill out your copyright notice in the Description page of Project Settings.
#pragma once
#include "CoreMinimal.h"
#include "GameFramework/Actor.h"
#include "Kismet/BlueprintFunctionLibrary.h"
#include "SaveToText.generated.h"
UCLASS()
class AMBITIONEARLYHOURSKY_API USaveToText : public UBlueprintFunctionLibrary
{
GENERATED_BODY()
public:
UFUNCTION(BlueprintCallable, Category = "save")
static bool FileSaveString(FString SaveTextB, FString FileNameB);
UFUNCTION(BlueprintPure, Category = "save")
static bool FileLoadString(FString FileNameA, FString& SaveTextA);
UFUNCTION(BlueprintCallable, Category = "save")
static FString FileLoadAndReturnString(FString FileNameA);
};
cpp ファイルも下記記のように編集します。以下のコードは https://answers.unrealengine.com/questions/174839/loading-text-to-a-string.html で紹介されているものです(保存以外にもテキストファイルの読み込み関数があります)。ちなみに、クラス名は ASaveToText と先頭に A が付いていますが、これが U であったりする場合もあります。その場合は cpp ファイルの中でクラス名が付いている箇所もそれに合わせるようにしてください。コンパイル時にエラーが出た時はヘッダと cpp ファイルでクラス名が一致していないことが原因だと思われます
// Fill out your copyright notice in the Description page of Project Settings.
#include "SaveToText.h"
// Load and save text files
bool USaveToText::FileSaveString(FString SaveTextB, FString FileNameB)
{
return FFileHelper::SaveStringToFile(SaveTextB, *( FileNameB));
}
bool USaveToText::FileLoadString(FString FileNameA, FString& SaveTextA)
{
return FFileHelper::LoadFileToString(SaveTextA, *( FileNameA));
}
FString USaveToText::FileLoadAndReturnString(FString FileNameA)
{
FString myString;
bool myBool = true;
myBool = FFileHelper::LoadFileToString(myString, *( FileNameA));
return myString;
}
h と .cpp ファイルを保存したら、UE4 のエディタ上でコンパイルボタン(ビルドボタンの右にある)を押します。コンパイルが成功したら作ったこの関数をブループリントで使えるようになります。
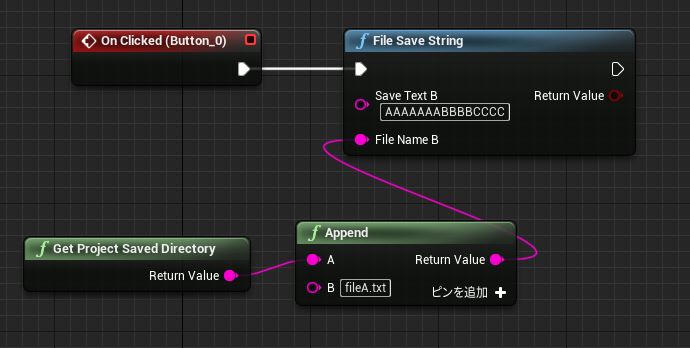
レベルブループリントなどを開いて記事冒頭のようなノードを組みます。
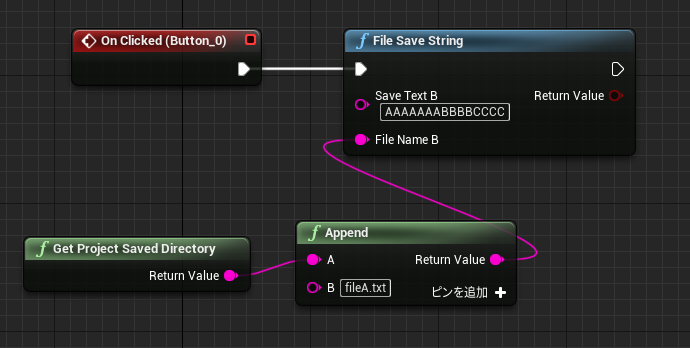
そして実行すれば、プロジェクトフォルダ内にテキストファイルが保存されています。やりました!
セットとクイック選択セットの 2 つある
ちなみにセットは非破壊(戻せる)、アセットは破壊(戻せない)機能のようだ。
Python
import maya.cmds as cmds
いくつかのオブジェクトを作成するーサンプルとして
cmds.sphere( n="sphere1" )
cmds.cone( n="cone1" )
現在アクティブなものでセットを作成する
cmds.select( 'sphere1' )
newSet1 = cmds.sets()
cmds.select( 'cone1' )
newSet2 = cmds.sets()
セットのメンバーをクエリする
cmds.sets( newSet1, q=True )
2つのセットを含むセットを作成します
cmds.sets( newSet1, newSet2, name="setOfSets" )
セットを選択するには、-noExpandフラグを使用する必要があります。さもないと
代わりにセットのメンバーが選択されます。
cmds.select( newSet1, noExpand=True )
cmds.ls( selection=True )
セットのメンバーを選択します
cmds.select( newSet1 )
cmds.ls( selection=True )
ballVerticesという名前の頂点セットを作成します。これには含まれます
球のすべての頂点。
cmds.sets( 'sphere1', name="ballVertices", vertices=1 )
cmds.select( 'ballVertices' )
2つのセットの和集合を返す
cmds.sets( newSet2, union=newSet1 )
セットのリストに共通のメンバーがあるかどうかをテストします
cmds.sets( 'ballVertices',isIntersecting=newSet1)
球がセットのメンバーであるかどうかをテストします
cmds.sets('sphere1',isMember=newSet1)
球をセットから削除します
cmds.sets( 'sphere1', remove=newSet1 )
球がセットのメンバーであるかどうかを再度テストします
cmds.sets( 'sphere1', isMember=newSet1 )
import maya.cmds as cmds
# いくつかのオブジェクトを作成するーサンプルとして
cmds.sphere( n="sphere1" )
cmds.cone( n="cone1" )
# 現在アクティブなものでセットを作成する
cmds.select( 'sphere1' )
newSet1 = cmds.sets()
cmds.select( 'cone1' )
newSet2 = cmds.sets()
# セットのメンバーをクエリする
cmds.sets( newSet1, q=True )
# 2つのセットを含むセットを作成します
cmds.sets( newSet1, newSet2, name="setOfSets" )
# セットを選択するには、-noExpandフラグを使用する必要があります。さもないと
# 代わりにセットのメンバーが選択されます。
cmds.select( newSet1, noExpand=True )
cmds.ls( selection=True )
# セットのメンバーを選択します
cmds.select( newSet1 )
cmds.ls( selection=True )
# ballVerticesという名前の頂点セットを作成します。これには含まれます
# 球のすべての頂点。
cmds.sets( 'sphere1', name="ballVertices", vertices=1 )
cmds.select( 'ballVertices' )
# 2つのセットの和集合を返す
cmds.sets( newSet2, union=newSet1 )
# セットのリストに共通のメンバーがあるかどうかをテストします
cmds.sets( 'ballVertices',isIntersecting=newSet1)
# 球がセットのメンバーであるかどうかをテストします
cmds.sets('sphere1',isMember=newSet1)
# 球をセットから削除します
cmds.sets( 'sphere1', remove=newSet1 )
# 球がセットのメンバーであるかどうかを再度テストします
cmds.sets( 'sphere1', isMember=newSet1 )重複してたらそのセットから削除してから新規セットに追加する
def unique_obj_sets_make_selected(newSetName):
#重複してたらそのセットから削除してから新規セットに追加する ---------------------------
#-------------------------------------------------------------
selected_arr=cmds.ls(selection=True)# [pCube9,pCube10,pCube11]
#newSet01_arr=cmds.sets( "newSet1", q=True )# [pCube4,pCube5,pCube6]
#newSet02_arr=cmds.sets( "newSet2", q=True )# [pCube7,pCube8,pCube9]
print("selected_arr= "+str(selected_arr))
#print("newSet01_arr= "+str(newSet01_arr))
#print("newSet02_arr= "+str(newSet02_arr))
# python のsetを使ってそれぞれユニーク化する
selected_set=set(selected_arr)
#newSet01_set=set(newSet01_arr)
#newSet02_set=set(newSet02_arr)
print("selected_set= "+str(selected_set))
#print("newSet01_set= "+str(newSet01_set))
#print("newSet02_set= "+str(newSet02_set))
# old_set を作る(和集合を使う)
#old_set=newSet01_set | newSet02_set
#print("old_set= "+str(old_set))
# old_set_full を作る(和集合を使う)
all_sets=cmds.ls(type="objectSet")
print("all_sets= "+str(all_sets))
old_arr_full=[]
old_set_full=set(old_arr_full)
for sets_name in all_sets:
sets_arr=cmds.sets( sets_name, q=True )
print("sets_arr= "+str(sets_arr))
if(str(sets_arr)=="None"):
print("None line")
else:
print("OK line")
sets_arr_len=len(sets_arr)
print("sets_arr_len= "+str(sets_arr_len))
sets_set=set(sets_arr)
old_set_full=old_set_full | sets_set
print("old_set_full= "+str(old_set_full))
# 積集合(共通部分をとる)
s_intersection = old_set_full & selected_set
print("s_intersection= "+str(s_intersection))
list_intersection=list(s_intersection)
#どこに入ってるかを調べる
top_all=cmds.ls()
#------------Get Type Name Code-----------
#print("top_all= "+str(top_all))
#for top_obj in top_all:
# objectType=cmds.objectType( top_obj )
# print("objectType="+str(objectType)+" top_obj= "+str(top_obj))
#----------------------------------------
all_sets=cmds.ls(type="objectSet")
print("all_sets= "+str(all_sets))
for sets_name in all_sets:
set_arr=cmds.sets( "newSet1", q=True )
for intersect_obj in list_intersection:
#セットのメンバーであるかどうかをテストします
isMemberBool=cmds.sets(intersect_obj,isMember=sets_name)
if(isMemberBool==True):
print(" sets_name= "+str(sets_name)+" in intersect_obj="+str(intersect_obj))
#セットから削除します
cmds.sets( intersect_obj, remove=sets_name )
cmds.select(selected_arr)
newSet3 =cmds.sets( selected_arr, name=str(newSetName) )
#newSet3 = cmds.sets()
unique_obj_sets_make_selected("newSet3")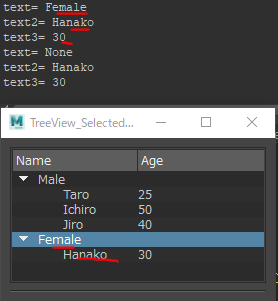
# -*- coding: utf-8 -*-
import os
from functools import partial
import time
import imp
"""
PySide2モジュールを探し、ある場合はそちらをインポートします。
"""
try:
imp.find_module('PySide2')
from PySide2.QtWidgets import *
from PySide2.QtGui import *
from PySide2.QtCore import *
except ImportError:
from PySide.QtGui import *
from PySide.QtCore import *
LOGO_IMAGE = r"画像のパスをここに入れてください。"
def get_maya_pointer():
"""
Mayaのメインウィンドウを取得する関数
"""
try:
import maya.cmds as cmds
from maya import OpenMayaUI
except ImportError:
return None
"""
実は2017ではshibokenも2になっているので、あればshiboken2をインポートします。
"""
try:
imp.find_module("shiboken2")
import shiboken2
return shiboken2.wrapInstance(int(OpenMayaUI.MQtUtil.mainWindow()), QWidget)
except ImportError:
import shiboken
return shiboken.wrapInstance(int(OpenMayaUI.MQtUtil.mainWindow()), QWidget)
class TreeView_Selected_Text(QMainWindow):
def __init__(self, parent = None):
super(TreeView_Selected_Text, self).__init__(parent)
self.setObjectName("TreeView_Selected_Text")
self.setWindowTitle("TreeView_Selected_Text")
self._initUI()
self.errorDialog = QErrorMessage(self) # QErrorMessageインスタンスの保持
def _initUI(self):
wrapper = QWidget()
self.setCentralWidget(wrapper)
mainLayout = QVBoxLayout()
wrapper.setLayout(mainLayout)
#-----------------------------------------------------------------------
#-----------------------------------------------------------------------
# fifth row
#-----------------------------------------------------------------------
fifthHorizontalArea = QHBoxLayout()
fifthHorizontalArea.setSpacing(20)
mainLayout.addLayout(fifthHorizontalArea)
fifthHorizontalArea.addWidget(self._makeTreeWidget())
mainLayout.addWidget(self._makeHorizontalLine())
#-----------------------------------------------------------------------
def _makeHorizontalLine(self):
hline = QFrame()
hline.setFrameShape(QFrame.HLine)
hline.setFrameShadow(QFrame.Sunken)
return hline
def _makeTreeWidget(self):
"""
QTreeWidgetを作成する関数
"""
treeWidget = QTreeWidget()
headerLabels = ["Name", "Age"]
treeWidget.setColumnCount(len(headerLabels))
treeWidget.setHeaderLabels(headerLabels)
treeWidget.setAlternatingRowColors(True)
treeData = {
"Male":[
{"name":"Taro", "age":"25"},
{"name":"Ichiro", "age":"50"},
{"name":"Jiro", "age":"40"}
],
"Female":[
{"name":"Hanako", "age":"30"}
]
}
#for sex, profiles in treeData.iteritems():
for sex, profiles in treeData.items():
topItem = QTreeWidgetItem([sex])
treeWidget.addTopLevelItem(topItem)
for profile in profiles:
childItem = QTreeWidgetItem(topItem, [profile.get("name"), profile.get("age")])
treeWidget.expandAll()
self.treeWidget=treeWidget
self.treeWidget.selectionModel().selectionChanged.connect(self.treeWidget_selectionChanged)
return treeWidget
def treeWidget_selectionChanged(self,selected, deselected):
print("----treeWidget_selectionChanged-----")
for QModelIndex in self.treeWidget.selectedIndexes():
text = QModelIndex.data(Qt.DisplayRole) # or ix.data()
print("text= "+str(text))
QModelIndex2=QModelIndex.child(0,0).sibling(0,0)
text2 = QModelIndex2.data(Qt.DisplayRole)
print("text2= "+str(text2))
QModelIndex3=QModelIndex.child(0,0).sibling(0,1)
text3 = QModelIndex3.data(Qt.DisplayRole)
print("text3= "+str(text3))
def start():
maya_win = get_maya_pointer()
ui = TreeView_Selected_Text(parent = maya_win)
ui.show()
return ui
if __name__ == '__main__':
app = QApplication.instance()
if app is None:
app = QApplication([])
ui = start()
app.exec_()Pythonで書き直した
# -*- coding: utf-8 -*-
from maya import cmds
import maya.mel as mel
import re
import pymel.core as pm
def selected_groupName():
selectedGlp=""
selectedArr=cmds.ls(sl=1)
print("selectedArr= "+str(selectedArr))
if(str(selectedArr)=="[]"):
print("You Should Select root Group Node!!!")
else:
selectedGlp=selectedArr[0]
#evalStr='$characterName = `hikCreateCharacter('+selectedGlp+')`'
#myPythonVar=mel.eval('$tempMelVar=$gMainWindow')
#characterName=mel.eval(evalStr)
#print(u"characterName= " + str(characterName))
return selectedGlp
def LongNameToShortName(LongName):
#childfullpath= |group_meshHIK_Tpose_jointUE4name5|SK_Mannequin|root|hip|spine_01
LongNameArr=LongName.split("|")
LongNameArrLong=len(LongNameArr)
shortName=LongNameArr[LongNameArrLong-1]
return shortName
def Group_in_joint(GroupName,jointName):
print("jointName= "+jointName)
HitJointFullPath=""
groupChild=cmds.ls(GroupName,dag=1,long=1)
for childfullpath in groupChild:
searchStr=r'.*'+'\|'+jointName+r'$'
print("searchStr= "+searchStr +" childfullpath= "+childfullpath)
MatchObj=re.match(searchStr, childfullpath)
MatchBool=bool(MatchObj)
if(MatchBool==True):
HitJointFullPath=childfullpath
print("HitJointFullPath !!!!!!!!= "+HitJointFullPath)
break
#shortjointNameArr=cmds.ls(childfullpath,shortNames=1)
#shortjointName=shortjointNameArr[0]
shortjointName=LongNameToShortName(childfullpath)
print("searchStr= "+jointName +" shortjointName= "+shortjointName)
if(str(shortjointName)==str(jointName)):
HitJointFullPath=childfullpath
print("HitJointFullPath !!!!!!!!= "+shortjointName)
break
print("HitJointFullPath= "+HitJointFullPath)
return HitJointFullPath
def setAttKeyFrame(GroupName,jointName,attName,attVal):
#MEL setCharacterObject("root",$characterDefName,0,0);
jointFullName=Group_in_joint(GroupName,jointName)
#evalStr='setCharacterObject("'+jointFullName+'","'+characterDefName+'",'+str(RigInt)+','+str(RigInt2)+');'
#print("evalStr= "+ evalStr)
attStr=jointFullName+'.'+attName
cmds.setAttr( attStr, attVal )
cmds.setKeyframe(jointFullName)
#mel.eval(evalStr)
def UE4JointSetToHumanIK():
GroupName= selected_groupName()
#print("characterDefName= "+characterDefName)
setAttKeyFrame(GroupName,"lowerJaw","rotateX",10)
setAttKeyFrame(GroupName,"lEyelidUpperInner","translateY",5.2)
setAttKeyFrame(GroupName,"lEyelidUpper","translateY",5)
setAttKeyFrame(GroupName,"lEyelidUpperOuter","translateY",5.2)
setAttKeyFrame(GroupName,"rEyelidUpperInner","translateY",5.2)
setAttKeyFrame(GroupName,"rEyelidUpper","translateY",5)
setAttKeyFrame(GroupName,"rEyelidUpperOuter","translateY",5.2)
UE4JointSetToHumanIK()マイナス5frameに移動してそれぞれのジョイントにセットアトリビュートしたあとキーを打つ
currentTime -5 ;
proc setkeyFrame_F(string $innerPath,string $attributeName,float $attributeValue)
{
string $selectedArrFUllPath_F[] = `ls -sl`;
print("$selectedArrFUllPath_F is ==");
print($selectedArrFUllPath_F);
string $groupName_F;
$groupName_F=$selectedArrFUllPath_F[0];
print("groupName_F= "+$groupName_F+"\n");
string $attpath_F;
$attpath_F = "|"+$groupName_F + $innerPath;
print("attpath_F= "+$attpath_F+"\n");
string $attStr_F;
$attStr_F =$attpath_F+"."+$attributeName;
print("attStr= "+$attStr_F+"\n");
setAttr $attStr_F $attributeValue;
setKeyframe -attribute $attributeName $attpath_F;
}
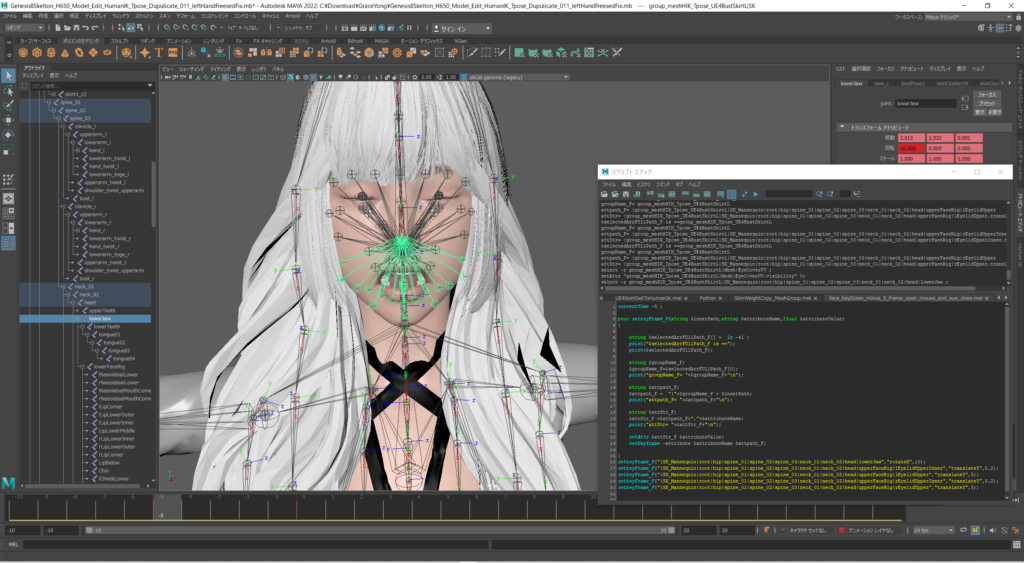
setkeyFrame_F("|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|neck_01|neck_02|head|lowerJaw","rotateX",10);
setkeyFrame_F("|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|neck_01|neck_02|head|upperFaceRig|lEyelidUpperInner","translateY",5.2);
setkeyFrame_F("|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|neck_01|neck_02|head|upperFaceRig|lEyelidUpper","translateY",5);
setkeyFrame_F("|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|neck_01|neck_02|head|upperFaceRig|rEyelidUpperInner","translateY",5.2);
setkeyFrame_F("|SK_Mannequin|root|hip|spine_01|spine_02|spine_03|neck_01|neck_02|head|upperFaceRig|rEyelidUpper","translateY",5);
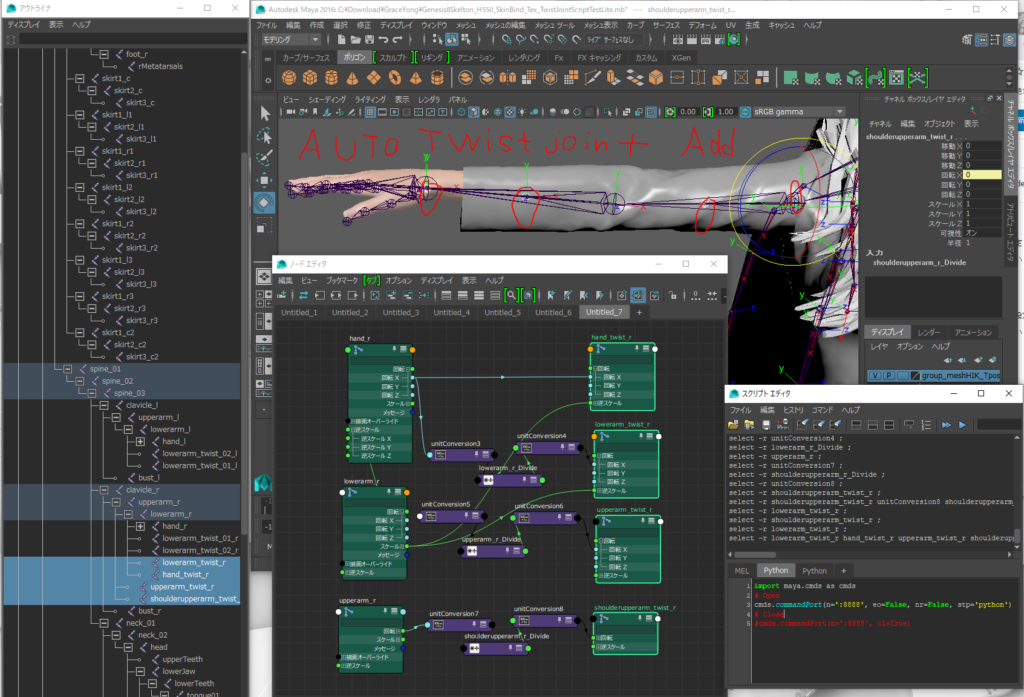
import maya.cmds as cmds
import pymel.core as pm
import os
class TwistJointClass:
def MainWay(self):
self.Selected_Joint_Check()
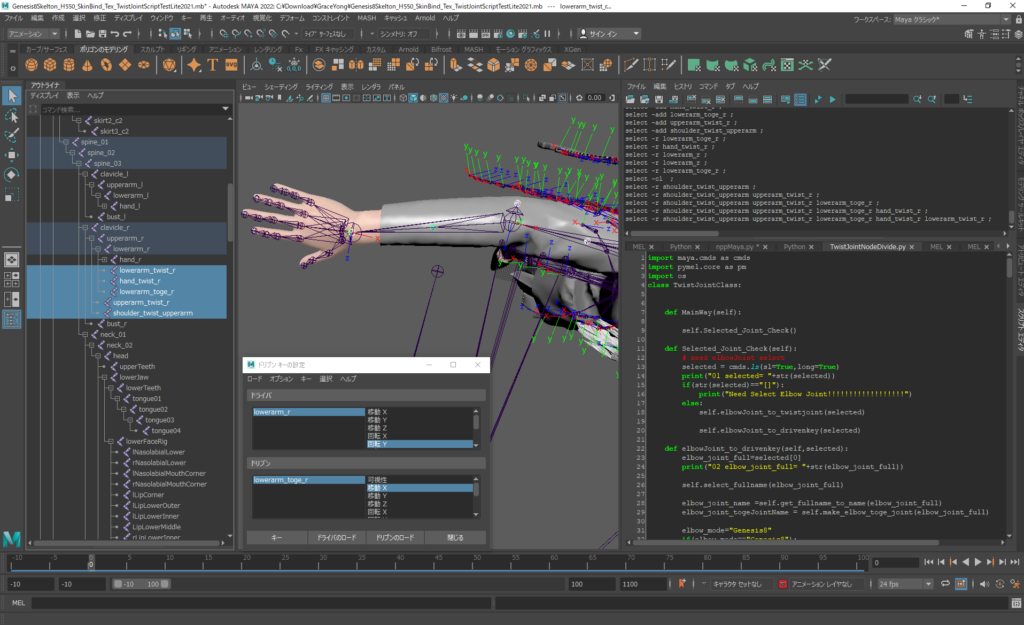
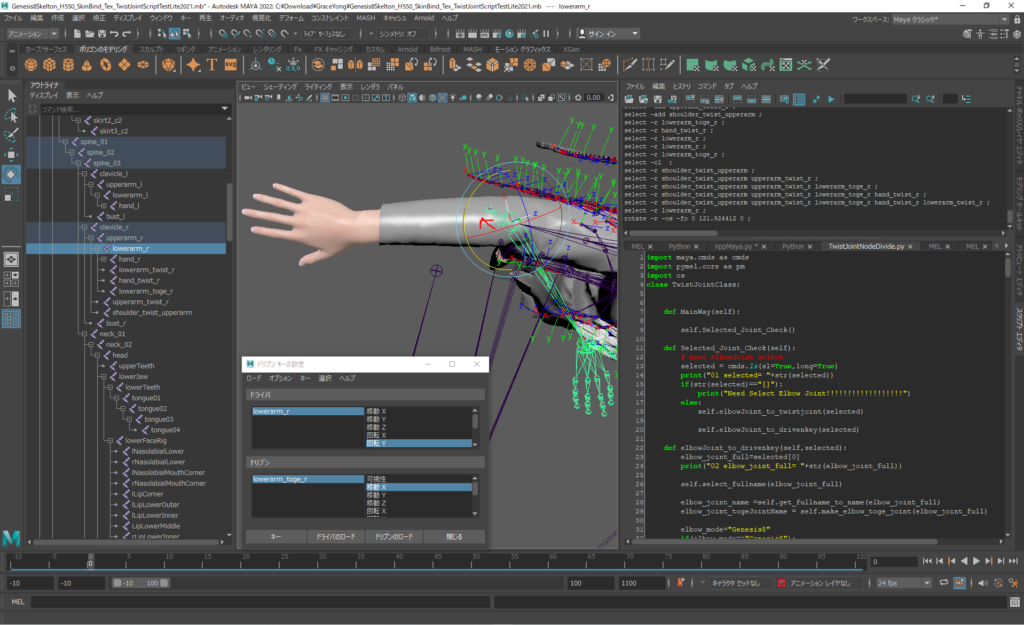
def Selected_Joint_Check(self):
# need elbowJoint select
selected = cmds.ls(sl=True,long=True)
print("01 selected= "+str(selected))
if(str(selected)=="[]"):
print("Need Select Elbow Joint!!!!!!!!!!!!!!!!!!")
else:
self.elbowJoint_to_twistjoint(selected)
self.elbowJoint_to_drivenkey(selected)
def elbowJoint_to_drivenkey(self,selected):
elbow_joint_full=selected[0]
print("02 elbow_joint_full= "+str(elbow_joint_full))
self.select_fullname(elbow_joint_full)
elbow_joint_name =self.get_fullname_to_name(elbow_joint_full)
elbow_joint_togeJointName = self.make_elbow_toge_joint(elbow_joint_full)
elbow_mode="Genesis8"
if(elbow_mode=="Genesis8"):
elbow_way_rz=".ry"# my model
else:
elbow_way_rz=".rz"# tutorial
print("elbow_way_rz= "+elbow_way_rz)
# Key Value 1
destArr=elbow_joint_name+elbow_way_rz
cmds.setAttr( destArr, 0 )
destArr=elbow_joint_togeJointName+".tx"
cmds.setAttr( destArr, 0 )
destArr=elbow_joint_togeJointName+elbow_way_rz
cmds.setAttr( destArr, 0 )
# Set DrivenKey
#setDrivenKeyframe -currentDriver lowerarm_r.rotateZ lowerarm_toge_r.translateX;
fromAttr=elbow_joint_name+elbow_way_rz
DestAttr=elbow_joint_togeJointName+'.tx'
cmds.setDrivenKeyframe( DestAttr, currentDriver= fromAttr)
#setDrivenKeyframe -currentDriver lowerarm_r.rotateZ lowerarm_toge_r.rotateZ;
fromAttr=elbow_joint_name+elbow_way_rz
DestAttr=elbow_joint_togeJointName+elbow_way_rz
cmds.setDrivenKeyframe( DestAttr, currentDriver= fromAttr)
# Key Value 2
SideWay=self.check_Left_Or_Right(elbow_joint_name)
print("64 SideWay= "+SideWay)
if(SideWay=="R"):
destArr=elbow_joint_name+elbow_way_rz
cmds.setAttr( destArr, 180 )
#setAttr "lowerarm_toge_r.translateX" 4;
destArr=elbow_joint_togeJointName+".tx"
cmds.setAttr( destArr, 4 )
if(SideWay=="L"):
destArr=elbow_joint_name+elbow_way_rz
cmds.setAttr( destArr, -180 )
#setAttr "lowerarm_toge_r.translateX" 4;
destArr=elbow_joint_togeJointName+".tx"
cmds.setAttr( destArr, -4 )
#setAttr "lowerarm_toge_r.rotateZ" 90;
#destArr=elbow_joint_togeJointName+elbow_way_rz
#cmds.setAttr( destArr, 90 )
# Set DrivenKey
#setDrivenKeyframe -currentDriver lowerarm_r.rotateZ lowerarm_toge_r.translateX;
fromAttr=elbow_joint_name+elbow_way_rz
DestAttr=elbow_joint_togeJointName+'.tx'
cmds.setDrivenKeyframe( DestAttr, currentDriver= fromAttr)
#setDrivenKeyframe -currentDriver lowerarm_r.rotateZ lowerarm_toge_r.rotateZ;
fromAttr=elbow_joint_name+elbow_way_rz
DestAttr=elbow_joint_togeJointName+elbow_way_rz
cmds.setDrivenKeyframe( DestAttr, currentDriver= fromAttr)
# reset joint rz
destArr=elbow_joint_name+elbow_way_rz
cmds.setAttr( destArr, 0 )
def check_Left_Or_Right(self,elbow_joint_name):
SideWay=""
jointName_arr=elbow_joint_name.split("_")
if(jointName_arr[0].lower()=="left"):
SideWay="L"
if(jointName_arr[0].lower()=="l"):
SideWay="L"
if(jointName_arr[1].lower()=="left"):
SideWay="L"
if(jointName_arr[1].lower()=="l"):
SideWay="L"
if(jointName_arr[0].lower()=="right"):
SideWay="R"
if(jointName_arr[0].lower()=="r"):
SideWay="R"
if(jointName_arr[1].lower()=="right"):
SideWay="R"
if(jointName_arr[1].lower()=="r"):
SideWay="R"
print("SideWay= "+SideWay)
return SideWay
def make_elbow_toge_joint(self,elbow_joint_full):
elbow_joint_name =self.get_fullname_to_name(elbow_joint_full)
elbow_joint_togeJointName=self.makeName_togejoint(elbow_joint_name)
elbow_pos=cmds.xform(elbow_joint_full,q=1,ws=1,rp=1)
print("elbow_pos=" +str(elbow_pos))
jointName2=cmds.joint( p=(elbow_pos[0], elbow_pos[1], elbow_pos[2]-3) ,absolute=True)
cmds.rename(jointName2,elbow_joint_togeJointName);
#cmds.parent( elbow_joint_togeJointName, elbow_joint_full )
cmds.makeIdentity( apply=True, t=1, r=1, s=1, n=0,pn=1,jointOrient=1)
return elbow_joint_togeJointName
def elbowJoint_to_twistjoint(self,selected):
elbow_joint_full=selected[0]
print("02 elbow_joint_full= "+str(elbow_joint_full))
hand_joint_full=self.get_one_child_node(elbow_joint_full)
print("03 hand_joint_full= "+str(hand_joint_full))
upperarm_joint_arr = cmds.listRelatives(str(elbow_joint_full),parent=True,fullPath=True)
upperarm_joint_full=upperarm_joint_arr[0]
print("04 upperarm_joint_full= "+str(upperarm_joint_full))
#shoulder_joint_arr = cmds.listRelatives(str(upperarm_joint_full),parent=True,fullPath=True)
#shoulder_joint_full= shoulder_joint_arr[0]
#print("05 shoulder_joint_full= "+str(shoulder_joint_full))
self.Elbow_Func(hand_joint_full,elbow_joint_full)
self.Hand_Func(hand_joint_full,elbow_joint_full)
#---------------------------------------------------------------------------------------
#--------------------------------- upperarm_joint_full -------------------------------
#---------------------------------------------------------------------------------------
self.UpperArm_Func(elbow_joint_full,upperarm_joint_full)
self.Shoulder_Func(upperarm_joint_full)
def Hand_Func(self,hand_joint_full,elbow_joint_full):
hand_joint_name =self.get_fullname_to_name(hand_joint_full)
hand_joint_twistJointName=self.makeName_twistjoint(hand_joint_name)
hand_pos=cmds.xform(hand_joint_full,q=1,ws=1,rp=1)
print("hand_pos=" +str(hand_pos))
jointName2=cmds.joint( p=(hand_pos[0], hand_pos[1], hand_pos[2]) ,absolute=True)
cmds.rename(jointName2,hand_joint_twistJointName);
cmds.parent( hand_joint_twistJointName, elbow_joint_full )
cmds.makeIdentity( apply=True, t=1, r=1, s=1, n=0,pn=1,jointOrient=1)
# -------------Hand CONNECT -----------------------------------------------------
fromAtt=hand_joint_name+".rotateX"
destArr=hand_joint_twistJointName+".rotateX"
cmds.connectAttr( fromAtt, destArr )
#--------------------------------------------------------------------------------
def Elbow_Func(self,hand_joint_full,elbow_joint_full):
# make joint
elbow_joint_name =self.get_fullname_to_name(elbow_joint_full)
elbow_joint_twistJointName=self.makeName_twistjoint(elbow_joint_name)
elbow_pos=cmds.xform(elbow_joint_full,q=1,ws=1,rp=1)
hand_pos=cmds.xform(hand_joint_full,q=1,ws=1,rp=1)
print("elbow_pos=" +str(elbow_pos))
print("hand_pos=" +str(hand_pos))
average_x=(elbow_pos[0]+hand_pos[0])/2
average_y=(elbow_pos[1]+hand_pos[1])/2
average_z=(elbow_pos[2]+hand_pos[2])/2
jointName=cmds.joint( p=(average_x, average_y, average_z) ,absolute=True)
cmds.rename(jointName,elbow_joint_twistJointName);
#makeIdentity -apply true -t 1 -r 1 -s 1 -n 0 -pn 1;
cmds.makeIdentity( apply=True, t=1, r=1, s=1, n=0,pn=1,jointOrient=1)
#cmds.joint( elbow_joint_twistJointName, e=True,position=(0, 0, 0) )
#-----------------elbow divide --------------------------------------------------
# 1
DivideName=elbow_joint_name+"_Divide"
cmds.shadingNode('multiplyDivide', asUtility=True, name=DivideName)
fromAtt=hand_joint_full+".rotateX"
destArr=DivideName+".input1X"
self.connectAttr_FullPath( fromAtt, destArr )
# ------------- CONNECT ----------
# 2
fromAtt=DivideName+".outputX"
destArr=elbow_joint_twistJointName+".rotateX"
self.connectAttr_FullPath( fromAtt, destArr )
# 3 ------------- setAttr --------------------------
destArr=DivideName+".input2X"
self.setAttr_FullPath( destArr, 0.5 )
def UpperArm_Func(self,elbow_joint_full,upperarm_joint_full):
#upperarm_joint_arr = cmds.listRelatives(str(elbow_joint_full),parent=True,fullPath=True)
#upperarm_joint_full=upperarm_joint_arr[0]
self.select_fullname(upperarm_joint_full)
# make joint -----------------------------------------
upperarm_joint_name =self.get_fullname_to_name(upperarm_joint_full)
upperarm_joint_twistJointName=self.makeName_twistjoint(upperarm_joint_name)
upperarm_pos=cmds.xform(upperarm_joint_full,q=1,ws=1,rp=1)
elbow_pos=cmds.xform(elbow_joint_full,q=1,ws=1,rp=1)
print("upperarm_pos=" +str(upperarm_pos))
print("elbow_pos=" +str(elbow_pos))
average_x=(elbow_pos[0]+upperarm_pos[0])/2
average_y=(elbow_pos[1]+upperarm_pos[1])/2
average_z=(elbow_pos[2]+upperarm_pos[2])/2
jointName=cmds.joint( p=(average_x, average_y, average_z) ,absolute=True)
cmds.rename(jointName,upperarm_joint_twistJointName);
#makeIdentity -apply true -t 1 -r 1 -s 1 -n 0 -pn 1;
cmds.makeIdentity( apply=True, t=1, r=1, s=1, n=0,pn=1,jointOrient=1)
#-----------------Upperarm divide2 --------------------------
#hand_joint_name=fullName_to_ShortName(hand_joint_full)
DivideName2=upperarm_joint_name+"_Divide"
cmds.shadingNode('multiplyDivide', asUtility=True, name=DivideName2)
# 1
fromAtt=upperarm_joint_name+".rotateX"
destArr=DivideName2+".input1X"
self.connectAttr_FullPath( fromAtt, destArr )
# ------------- CONNECT ----------
# 2
fromAtt=DivideName2+".outputX"
destArr=upperarm_joint_twistJointName+".rotateX"
self.connectAttr_FullPath( fromAtt, destArr )
# 3 ------------- setAttr --------------------------
destArr=DivideName2+".input2X"
self.setAttr_FullPath( destArr, -0.5 )
#-----------------Upperarm divide2 --------------------------END
def Shoulder_Func(self,upperarm_joint_full):
#upperarm_joint_arr = cmds.listRelatives(str(elbow_joint_full),parent=True,fullPath=True)
#upperarm_joint_full=upperarm_joint_arr[0]
self.select_fullname(upperarm_joint_full)
# make joint -----------------------------------------
upperarm_joint_name =self.get_fullname_to_name(upperarm_joint_full)
shoulder_joint_twistJointName=self.makeName_twistjoint("shoulder_"+upperarm_joint_name)
upperarm_pos=cmds.xform(upperarm_joint_full,q=1,ws=1,rp=1)
print("upperarm_pos=" +str(upperarm_pos))
jointName=cmds.joint( p=(upperarm_pos[0], upperarm_pos[1], upperarm_pos[2]) ,absolute=True)
cmds.rename(jointName,shoulder_joint_twistJointName);
#makeIdentity -apply true -t 1 -r 1 -s 1 -n 0 -pn 1;
cmds.makeIdentity( apply=True, t=1, r=1, s=1, n=0,pn=1,jointOrient=1)
#-----------------Upperarm divide3 --------------------------
#hand_joint_name=fullName_to_ShortName(hand_joint_full)
DivideName3="shoulder_"+upperarm_joint_name+"_Divide"
cmds.shadingNode('multiplyDivide', asUtility=True, name=DivideName3)
# 1
fromAtt=upperarm_joint_name+".rotateX"
destArr=DivideName3+".input1X"
self.connectAttr_FullPath( fromAtt, destArr )
# ------------- CONNECT ----------
# 2
fromAtt=DivideName3+".outputX"
destArr=shoulder_joint_twistJointName+".rotateX"
self.connectAttr_FullPath( fromAtt, destArr )
# 3 ------------- setAttr --------------------------
destArr=DivideName3+".input2X"
self.setAttr_FullPath( destArr, -1 )
#-----------------Upperarm divide2 --------------------------END
def select_fullname(self,fullname):
import sys
try:
cmds.select( fullname)
except OSError as err:
print("OS error: {0}".format(err))
except ValueError:
print("Could not convert data to an integer.")
except:
print("Unexpected error:", sys.exc_info()[0])
#raise
def setAttr_FullPath(self, destArr ,value):
import sys
try:
cmds.setAttr( destArr, value )
except OSError as err:
print("OS error: {0}".format(err))
except ValueError:
print("Could not convert data to an integer.")
except:
print("Unexpected error:", sys.exc_info()[0])
#raise
def fullName_to_ShortName(fullName):
shortName=""
fullName_index=fullName.find("|")
if(fullName_index==-1):
pass
else:
fullName_Arr=fullName.split("|")
fullName_Len=len(fullName_Arr)
shortName = fullName_Arr[fullName_Len-1]
print("shortName= "+shortName)
return shortName
def connectAttr_FullPath(self, fromAtt, destArr ):
import sys
try:
cmds.connectAttr( fromAtt, destArr )
except OSError as err:
print("OS error: {0}".format(err))
except ValueError:
print("Could not convert data to an integer.")
except:
print("Unexpected error:", sys.exc_info()[0])
#raise
def get_one_child_node(self,elbow_joint_full):
hand_joint_full=""
hand_joint_arr = cmds.listRelatives(str(elbow_joint_full),children=True,fullPath=True)
print("02 hand_joint_arr= "+str(hand_joint_arr))
temp_child_name=hand_joint_arr[0]
elbow_arr=elbow_joint_full.split("|")
elbow_len=len(elbow_arr)-1
elbow_last=elbow_arr[elbow_len]
print("elbow_last= "+elbow_last)
temp_arr=temp_child_name.split("|")
temp_len=len(temp_arr)-1
temp_elbowlastlen_name=temp_arr[elbow_len]
temp_elbowlastlen_plusone_name=temp_arr[elbow_len+1]
print("temp_elbowlastlen_name= "+temp_elbowlastlen_name)
if(elbow_last==temp_elbowlastlen_name):
print("same OK temp_elbowlastlen_name= "+temp_elbowlastlen_name)
print("temp_elbowlastlen_plusone_name= "+temp_elbowlastlen_plusone_name)
#for jname in temp_arr
buildStr=""
#for(int i = 0; i < elbow_len+1; i++)
for i in range(1,elbow_len+1+1):
jname = temp_arr[i]
buildStr=buildStr+"|"+jname
print("buildStr= "+buildStr)
hand_joint_full=buildStr
return hand_joint_full
def handJoint_to_twistjoint(self):
# need hand select
selected = cmds.ls(sl=True,long=True)
print("01 selected= "+str(selected))
hand_joint_full=selected[0]
print("02 hand_joint_full= "+str(hand_joint_full))
"""
hiji_joint_arr = cmds.listRelatives(str(hand_joint_full),parent=True,fullPath=True)
hiji_joint_full=hiji_joint_arr[0]
print("03 hiji_joint_full= "+str(hiji_joint_full))
"""
#hand_joint_name =self.get_fullname_to_name(hand_joint_full)
#hiji_joint_name =self.get_fullname_to_name(hiji_joint_full)
#hiji_twistJointName=self.makeName_twistjoint(hiji_joint_name)
#cmds.select(hiji_joint_full)
#cmds.insertJoint( 'joint2' )
#あとで復帰
#cmds.select(selected)
#cmds.select(hand_joint_full)
def makeName_twistjoint(self,joint_name):
joint_name_arr= joint_name.split("_")
twistJointName=joint_name_arr[0]+"_twist_"+joint_name_arr[1]
print("twistJointName= "+twistJointName)
return twistJointName
def makeName_togejoint(self,joint_name):
joint_name_arr= joint_name.split("_")
togeJointName=joint_name_arr[0]+"_toge_"+joint_name_arr[1]
print("togeJointName= "+togeJointName)
return togeJointName
def get_fullname_to_name(self,fullname):
hand_joint_full_arr=fullname.split("|")
print("04 hand_joint_full_arr= "+str(hand_joint_full_arr))
hand_joint_full_len=len(hand_joint_full_arr)
hand_joint_jointName=hand_joint_full_arr[hand_joint_full_len-1]
print("05 hand_joint_jointName= "+str(hand_joint_jointName))
return hand_joint_jointName
ClassIns= TwistJointClass()
ClassIns.MainWay()